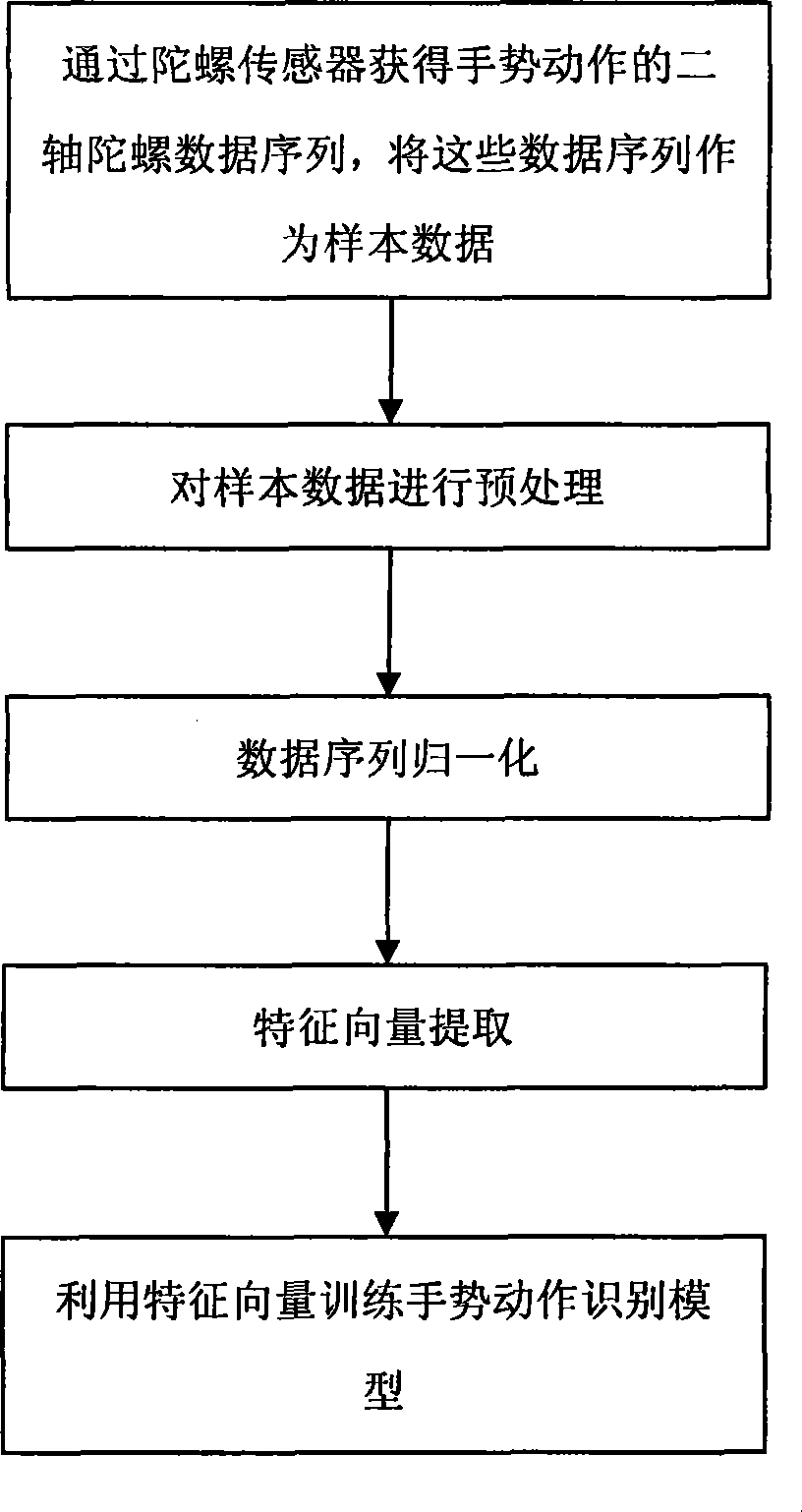
1.一种手势动作识别模型的训练方法,包括:步骤1)、通过陀螺传感器获取用于手势动作识别训练的样本数据,所述样本数据包括用于记录某一手势动作的二轴陀螺数据序列;步骤2)、对步骤1)所得到的样本数据中的各个二轴陀螺数据序列做数据长度归一化,生成标准长度的二轴陀螺数据序列;步骤3)、从步骤2)所得到的二轴陀螺数据序列中提取特征向量;所述特征向量反映了所述陀螺传感器的运动角度信息;步骤4)、利用所述的特征向量训练手势动作识别模型。
2.根据权利要求1所述的手势动作识别模型的训练方法,其特征在于,所述特征向量用
![]()
表示,该向量维度是2DIM,其计算公式如下:
evix=sin(xi-μx(xi-μx)2+(yi-μy)2),]]>eviy=sin(yi-μy(xi-μx)2+(yi-μy)2)]]>其中,(x
i,y
i)是从步骤2)得到的二轴陀螺数据序列中所包含的陀螺传感器的水平和垂直方向的瞬时角速度,(μ
x,μ
y)是处于静止状态时统计出来的均值;特征向量
![]()
3.根据权利要求1或2所述的手势动作识别模型的训练方法,其特征在于,在所述的步骤1)中还包括:对所获取的样本数据进行预处理,以去除所述样本数据中影响手势动作识别的冗余数据。
4.根据权利要求3所述的手势动作识别模型的训练方法,其特征在于,所述的预处理包括空闲数据剔除,以去除所述二轴陀螺数据序列中用于表示手势动作处于静止状态的数据。
5.根据权利要求3所述的手势动作识别模型的训练方法,其特征在于,所述的预处理包括异常数据剔除,以去除所述二轴陀螺数据序列中由于外部因素而造成的非正常数据。
6.根据权利要求3所述的手势动作识别模型的训练方法,其特征在于,所述的预处理包括数据平滑滤波。
7.根据权利要求1或2或3所述的手势动作识别模型的训练方法,其特征在于,在所述的步骤1)中,通过陀螺传感器获取用于手势动作识别训练的样本数据包括:步骤1-1)、通过陀螺传感器获取一段时间内用于手势动作识别训练的样本数据;步骤1-2)、对步骤1-1)所获取的样本数据进行分割,以区分不同手势动作所对应的二轴陀螺数据序列。
8.根据权利要求1或2或3所述的手势动作识别模型的训练方法,其特征在于,在所述的步骤2)中,采用插值法或亚采样法对样本数据中的各个二轴陀螺数据序列做数据长度归一化。
9.根据权利要求2所述的手势动作识别模型的训练方法,其特征在于,所述手势动作识别模型为支持向量机模型,利用所述的特征向量训练手势动作识别模型能够得到多组与所述支持向量机模型所对应的向量空间sv
ij、拉格朗日乘子α
i和γ、偏斜量参数β以及参数长度SIZE,一组所述向量空间sv
ij、拉格朗日乘子α
i和γ、偏斜量参数β以及参数长度SIZE对应一种类型的手势动作。
10.一种手势动作识别方法,包括:步骤1)、通过陀螺传感器获取待识别的手势动作,所述待识别的手势动作用二轴陀螺数据序列表示;步骤2)、对步骤1)所得到的用于表示待识别的手势动作的二轴陀螺数据序列做数据长度归一化,将其转化为标准长度;步骤3)、从步骤2)所得到的二轴陀螺数据序列中提取特征向量;所述特征向量反映了所述陀螺传感器的运动角度信息;步骤4)、将前一步骤所提取的特征向量输入到权利要求1-8之一所生成的手势动作识别模型中,根据手势动作识别模型的计算结果得到待识别的手势动作的类型。
11.根据权利要求10所述的手势动作识别方法,其特征在于,在所述的步骤1)中还包括:对待识别的手势动作的二轴陀螺数据序列进行预处理,以去除所述二轴陀螺数据序列中影响手势动作识别的冗余数据。
12.根据权利要求11所述的手势动作识别方法,其特征在于,所述的预处理包括空闲数据剔除,以去除所述二轴陀螺数据序列中用于表示手势动作处于静止状态的数据。
13.根据权利要求11所述的手势动作识别方法,其特征在于,所述的预处理包括异常数据剔除,以去除所述二轴陀螺数据序列中由于外部因素而造成的非正常数据。
14.根据权利要求11所述的手势动作识别方法,其特征在于,其特征在于,所述的预处理包括数据平滑滤波。
15.根据权利要求10所述的手势动作识别方法,其特征在于,在所述步骤3)中,所述特征向量用
![]()
表示,该向量维度是2DIM,其计算公式如下:
evix=sin(xi-μx(xi-μx)2+(yi-μy)2),]]>eviy=sin(yi-μy(xi-μx)2+(yi-μy)2)]]>其中,(x
i,y
i)是从步骤2)得到的二轴陀螺数据序列中所包含的陀螺传感器的水平和垂直方向的瞬时角速度,(μ
x,μ
y)是处于静止状态时统计出来的均值;特征向量
![]()
16.根据权利要求15所述的手势动作识别方法,其特征在于,所述手势动作识别模型为支持向量机模型,所述步骤4)包括:步骤4-1)、由权利要求1-9之一所生成的手势动作识别模型得到多组向量空间sv
ij、拉格朗日乘子α
i和γ、偏斜量参数β以及参数长度SIZE;选择其中一组结果执行步骤4-2);步骤4-2)、将由步骤3)所得到的待识别的手势动作的特征向量
![]()
代入下列公式,得到一计算结果:
Σi=0SIZEαi×e-γ×Σj=02×DIM(evj-svij)2+β]]>其中,ev
j为特征向量
![]()
的某一分量;步骤4-3)、判断所述多组向量空间sv
ij、拉格朗日乘子α
i和γ、偏斜量参数β以及参数长度SIZE是否都已经执行步骤4-2),若都已经执行,则执行下一步,否则取未执行的一组向量空间sv
ij、拉格朗日乘子α
i和γ、偏斜量参数β以及参数长度SIZE,然后重新执行步骤4-2);步骤4-4)、将步骤4-2)所得到的计算结果中值最大的计算结果所对应的某一组向量空间sv
ij、拉格朗日乘子α
i和γ、偏斜量参数β以及参数长度SIZE所代表的手势动作类型作为待识别的手势动作的类型。

 北京
北京
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们