
- 技术(专利)类型 实用新型
- 申请号/专利号 201921927558.9
- 技术(专利)名称 一种变速省力吸收加速传动组件
- 项目单位
- 发明人 宿秀文
- 行业类别 人类生活必需品
- 技术成熟度 可以量产
- 交易价格 ¥面议
- 联系人 宿秀文
- 发布时间 2020-08-04
 北京
北京
客服热线:010-83278899
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们
 北京
北京
客服热线:010-83278899
微信公众号 扫一扫 关注我们

项目简介
凝聚动力增幅器
一.项目背景技术:
1.在我的概念中,外骨骼应该是一种能跑.能跳.能扛的高端机器,可是目前国内外生产的机器外骨骼动作僵硬,走路都成问题。没电了就是累赘,根本不能长途奔袭。
2. 目前世面上设计产品是直接将电机上的力作用在机械臂足上的,上面有变速器但没有变速箱,就好像汽车没有变速箱档位一样,6AT.8AT.10AT变速箱不是摆设,档位越多越省油,就好像卡车18个档位,因为加速度需要一个输出力的变化过程,这就是以上变速箱的由来。1档.2档.3档...6档慢慢往上加车才能跑的快。机械臂足与汽车轮胎不一样,轮胎是一直与地面接触持续性输出的。机器臂足是间断性的,意思就是在离开地面前必须一次性释放所有的力,一旦腾空输出就会停止,最最重要的是机械臂足的做功是完全变化的,(杠杆)阻力臂(机械臂足)围绕支点(主轴)旋转,动力臂不变,但阻力臂变化巨厉。就好像轮胎的半径一直在变(主轴与地面的距离),比如做俯卧撑双手撑地很简单,但是在手掌的下面安装轮子,手臂往前推身体靠近地面,你会发现越往前,起来时需要的力越大。这是因为臂足的力量有一个曲线性输出,这也是机械臂足动力要考虑进去的问题。
二.项目技术内容:
1.通过本人的不断设计改进,设计出了新方案来解决这些问题。物体在移动过程中会产生惯性和重力,将这股力吸收释放叫弹性释能。(比如:蹦床,弹跳翘,减震弹簧等)物体跳的越高.移动速度越快,落下来停止时产生的速度力越大,如何将其完美的吸收利用到外骨骼动力上成为关键。
2.目前机械动能的吸收部件有弹簧、橡皮筋、空气压缩等,它们都存在一个问题,物体被压缩或者拉伸时产生的弹性力都是由小到大的过程,越压越费劲,释放的弹力也只能从大到小的释放。就好像汽车起步很猛用6挡会打滑,速度上来了又用1挡一样,这就导致可控性的局限和力的损耗。再比如:以前70磅的传统弓箭我们在开拉时是40磅,拉满时瞄准需要手用70磅的力量来控制瞄准,这就导致手会抖动很难瞄准,可是目前现代复合弓通过两个偏心轮组三根弓弦变速在拉满时只需要20磅来控制瞄准,这种变速省力比为75%的现代复合弓不仅提高了射手瞄准时的轻松度,也更好的获得了加速度,同等磅数下复合弓比传统弓射程远。如果利用这个原理可以将弹性省力比调整在100%。
注意:如果传统弓为1.0版本,复合弓为2.0版本,那这个设计就是臂足机器人载具或外骨骼2.0版本最好方案。(一定要明白发明复合弓的重要性)
三.项目技术实施:
1.臂足机器人或外骨骼使用偏心轮变速技术后,不仅可以更好的吸收移动奔跑产生的惯性力和重力。最主要的是本体的回缩力储存,在机械臂足的伸缩过程中,伸出是释放力,收缩是压缩储力,因为动能储存后会与释放轮链接,释放轮变速省力比是100%,所以不会出现反弹,完全封锁。因为机械臂足收缩时的反压缩储力过程与惯性力和重力吸收过程同步动作,达到相互动力互补的效果,及能弥补吸收时的速度力,又能弥补吸收的总量不变,还能作为动力源来使用。过程全自动,通过惯性力和重力吸收的弹性释能的加入,再加上机械臂足释放本体的弹跳力,就可以获得至少两个动能输出,保值可以产生两倍以上的力量。
2.这只是第一阶段,第二阶段可以完成累计吸收释放。比如:吸收一个循环的力可以储存,那吸收多个循环的力同时释放会怎么样,我们推测一下,当多个循环的力同时释放产生的动能可以跳两米,从两米高度落下产生的重力加速度再被吸收,过程中的损耗由机器臂足伸缩弥补过来,设备就可以一直以两米跳高的俯冲奔跑,还拥有更好的负重越野能力。
四.项目技术优势:
1.外骨骼在没动力的情况下,依然可以靠人自身的力量带动外骨骼前进,因为人本身就是动力源。在臂足机器人上也能获得节能.动力增幅的效果。
2.这是一款专门为机器臂足机器人移动能力设计的增幅变速箱,使用在现成的臂足机器人或者外骨骼上面。在此基础上面预留接口,安装凝聚动力变速箱模块,因为模块是独立的,可随意拆装,可以单独研发制造,不与本体产生冲突,不会影响机器人本身性能。
3.因为可以采用别的公司现成的外骨骼或者臂足机器人改装,只需要在此基础上加装一个凝聚动力增幅器模块,第一阶段是全自动简单很多。第二阶段是半自动,由多个储力模块整合而成,
主要是研发二阶段凝聚动力增幅器模块的控制单元。
五.项目发展间断:
1.也申请专利,有第一阶段设计图,标准版与简化版。
2.有第一阶段简化版样品,样品可以在没有任何控制的情况下循环完成工作,工作内容为:变速吸收力后控制反弹,进入随时输出状态待机,输出时力从小到大释放力,释放过程全自动,重复进入循环。样品在吸收外来力的情况下可以将力量储存,做到及收及放,目的也达到。
六.市场分析:
1.这个产品主要是需求是军方军用,其次是民用市场。可以用到国防建设,抢险救灾,户外运输,单兵作战,负重越野。民用可以户外探索,健身娱乐,科研教育。特别是国家很可能收购,目前全世界也没有这样的技术出现过,比如美国波士顿动力公司的机器人,国内傲鲨智能的动力外骨骼送快递,宇树科技的机器狗。都还没有采用此技术。
2.因为产品是可以独立模块,采用别的公司现成的外骨骼或者臂足机器人改装,只要第二阶段技术制造出成品,国家肯定会关注,而且国家不收购的可能性很小。就算国家不收购,也会资助。评鉴第二阶段的动力出色表现可以拉来很多的资金用来发展壮大。
七.项目预计效果:
第一阶段:
1.士兵穿戴凝聚动力外骨骼,在没有动力的情况下能负重小跑。在加入动力的情况可以负重越野奔跑。
2.使用凝聚动力增幅器的臂足机器在奔跑过程中可以获得节能和动力增幅,效果为50%—90%。
第二阶段:
1.在外骨骼或者臂足机器人上安装动力整合单元,单元由多个凝聚动力增幅器构成,用控制器控制动力吸收和释放规律,可以吸收多个循环的能量储存,必要时释放所有能量弹射起步。
2.当多个循环的力同时释放产生的动能可以跳两米,从两米高度落下产生的重力加速度再被吸收,过程中的损耗由机械臂足收缩时的反压缩储力与惯性力和重力吸收弥补过来,加上机器本来的移动动能。设备就可以一直以两米跳高的俯冲力奔跑,还拥有更好的负重越野能力。
注意:具体极限还不知道,虽然使用了动力变速让弹性势能优化比直接弹性势能好,但动力损耗还需要弥补,弥补的动力源为机械臂足收缩时的反压缩与惯性力和重力吸收,加上机器本来的移动动能。这样机器就可以一直维持这种高性能输出。
比方: 设备积累多个循环的能量,一次性释放可以原地跳三米高,落下来时吸收三米高度产生的动能,加上机械臂足收缩时的反压缩与机器本来的移动弹跳动能,刚好弥补刚才释放的动能。这样机器就可以维持原地同水平跳高输出。因为多个力量的储存是变速过的,动力省力比100%封锁,释放可以选择加速释放.动力原位释放。
八 第二阶段设计:
1.模块内由1号2号3号储力部件和控制器组成,1号可以储存1个循环的力,2号可以储存两个循环的力,3号可以储存四个循环的力。
2.机器通过自身能力移动储存完一个循环力进1号储力部件,2号3号轮空等待。一个循环力等于机器自身移动释放需要的力.加机器移动产生的惯性力重力吸收.加机械臂反压缩的力。当再移动就可以释放这个1号储力部件的第循环力时,加上新的机器移动本来可以释放的力,形成两个循环力吸收进2号储力部件,1号3号轮空。现在设备储存了两个循环力,释放时在加入机器本身的移动力,产生3个储存力用1号2号储存,3号轮空。四个循环力用3号储存,1号2号轮空。以此类推,1号2号3号轮换使用。可以储存满7个循环力,
九.项目需求:
1.需要一台外骨骼或者一台臂足机器人来改装。
2.需要改装资金,零部件加工设计制造资金。
说明书
技术领域
本实用新型涉及机械传动技术领域,具体涉及一种变速省力吸收加速传动组件。
背景技术
目前机械动力的吸收储存部件有弹簧、橡皮筋、空气压缩等,它们都存在一个问题,物体被压缩或者拉伸时产生的弹性力都是由小到大过程,释放也只能从大到小的释放。就好像汽车起步用6挡,高速用1挡一样,这就导致可控性的局限和力的浪费。比如以前70磅的传统弓箭我们在拉满时瞄准需要手用70磅的力量来控制,这样导致手会抖动很难瞄准,目前现代复合弓通过两个偏心轮组三根弓弦变速在拉满时只需要20磅来控制,这种变速省力比为75%的现代复合弓不仅提高了射手瞄准时的轻松度,也比传统弓箭同等磅数下弓箭的射程远。其实利用这个杠杆原理可以将弹性省力比控制在更高的范围之内。但现有技术还没有实现更高弹性省力比的较为简便、灵活的传动装置。实用新型内容针对现有技术存在的不足,本实用新型提供了一种变速省力吸收加速传动组件,其应用时,可以在传动过程中实现更高的弹性省力比和弹力释放效果,且该组件结构简单,使用灵活。本实用新型所采用的技术方案为:一种变速省力吸收加速传动组件,包括固定壳体,固定壳体内设有储力弹性部件、中空主力卡钩、中空变速卡钩和偏心传动机构,所述储力弹性部件沿竖直方向伸缩,其顶部与固定壳体固定连接,底部与中空主力卡钩连接,中空主力卡钩的底部设有主传动绳,主传动绳竖直连接在偏心传动机构的一端,所述中空变速卡钩的顶部连接有卡钩回位弹力索,卡钩回位弹力索的顶端固定在储力弹性部件旁,中空变速卡钩的底部设有变速传动绳,变速传动绳的底端连接在偏心传动机构的另一端,所述中空主力卡钩设有斜上的钩口,所述中空变速卡钩设有斜下的钩口,中空主力卡钩的钩口与中空变速卡钩的钩口适配,所述偏心传动机构设在中空主力卡钩和中空变速卡钩下方,与固定壳体形成转动连接,偏心传动机构用于通过偏心转动带动中空变速卡钩卡接在中空主力卡钩上,使储力弹性部件和卡钩回位弹力索共同向下拉伸,中空变速卡钩套在主传动绳上滑动。作为上述技术方案的优选,所述偏心传动机构包括变速偏心轮组和偏心轮传动臂,所述偏心轮传动臂位于变速偏心轮组下方,变速偏心轮组和偏心轮传动臂均与固定壳体转动连接,主传动绳与偏心轮传动臂连接,变速传动绳与变速偏心轮组连接,偏心轮传动臂与变速偏心轮组之间通过副传动绳连接。作为上述技术方案的优选,所述变速偏心轮组包括两个偏心轮和偏心轴,两个偏心轮通过偏心轴形成偏心转动连接,偏心轴与固定壳体固定连接,所述偏心轮传动臂包括一体式连接的第一转轮和第一力臂,第一转轮与固定壳体固定连接,主传动绳与副传动绳均连接在第一转轮上,使得第一转轮转动时,主传动绳带动中空主力卡钩向下移动,副传动绳带动两个偏心轮转动;变速传动绳与下方同侧的偏心轮连接,副传动绳与另一个偏心轮连接,使得第一转轮带动两个偏心轮转动时,两个偏心轮的转动方向相同,且两个偏心轮的转动方向与第一转轮的转动方向相反。作为上述技术方案的优选,所述偏心传动机构包括一体式连接的第二力臂、第二转轮和转矩角,转矩角设于第二转轮外侧,且转矩角的尖角竖直向上,主传动绳与转矩角的尖角顶端连接,变速传动绳与第二转轮连接,第二转轮用于带动转矩角朝靠近变速传动绳的一侧转动。作为上述技术方案的优选,所述第二力臂一端对接第二转轮,另一端转动连接有辅助转动件。作为上述技术方案的优选,所述储力弹性部件为弹簧或者皮筋。作为上述技术方案的优选,所述储力弹性部件包括两根弹簧和一根皮筋,中空主力卡钩通过皮筋与固定壳体连接,在皮筋两侧设连接开关,两根弹簧与皮筋通过连接开关连接。作为上述技术方案的优选,所述卡钩回位弹力索为弹簧或者皮筋。本实用新型的有益效果为:本实用新型可通过外力作用于偏心传动机构,使中空主力卡钩和中空变速卡钩逐渐统一移动轨迹,直至中空主力卡钩和中空变速卡钩相互配合卡接在一起,使储力弹性部件和卡钩回位弹力索的弹力可以得到有效存储,其在传动过程中可以实现更高的弹性省力比和弹力释放效果,且该组件结构简单,使用更灵活。
附图说明
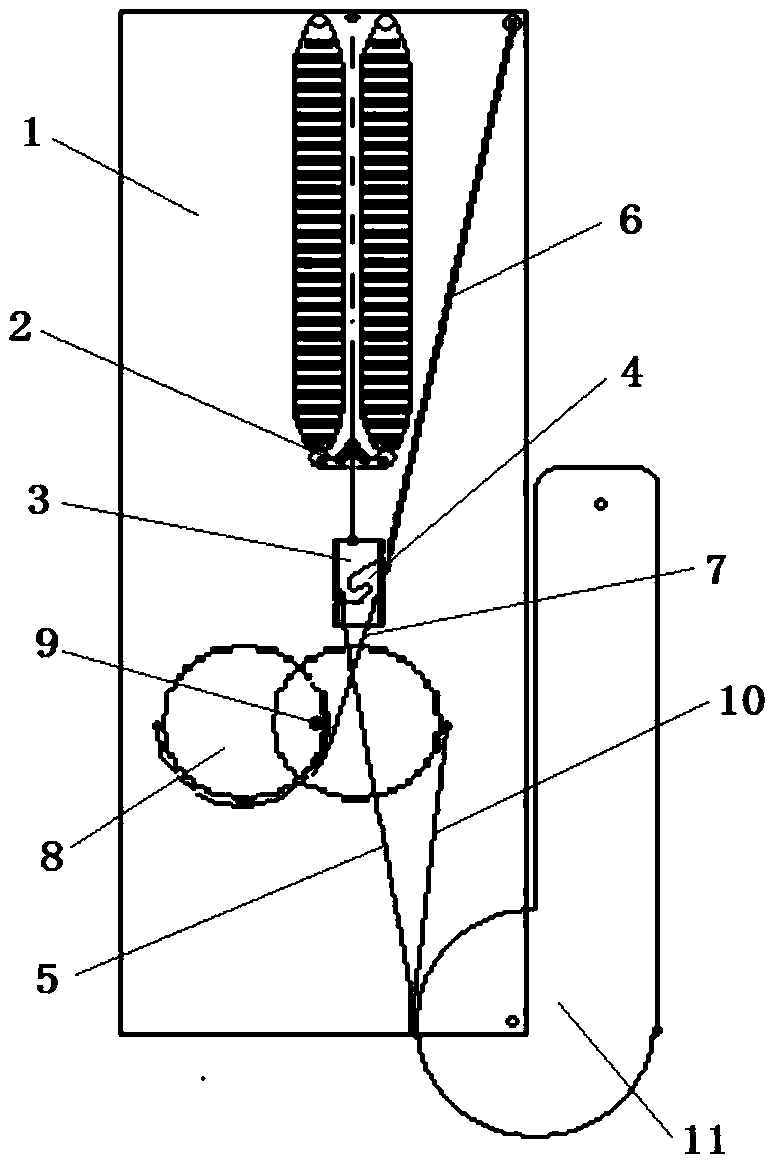
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。图1为实施例1中组件未拉伸时的结构示意图;图2为实施例1中组件拉伸后的结构示意图;图3为实施例2中组件未拉伸时的结构示意图;图4为实施例2中组件拉伸过程中的结构示意图;图5为实施例2中组件拉伸后的结构示意图。图中:1、固定壳体;2、储力弹性部件;3、中空主力卡钩;4、中空变速卡钩;5、主传动绳;6、卡钩回位弹力索;7、变速传动绳;8、偏心轮;9、偏心轴;10、副传动绳;11、偏心轮传动臂;12、第二力臂;13、第二转轮;14、转矩角;15、辅助转动件。
具体实施方式
下面结合附图及具体实施例对本实用新型作进一步阐述。在此需要说明的是,对于这些实施例方式的说明用于帮助理解本实用新型,但并不构成对本实用新型的限定。本文公开的特定结构和功能细节仅用于描述本实用新型的示例实施例。然而,可用很多备选的形式来体现本实用新型,并且不应当理解为本实用新型限制在本文阐述的实施例中。应当理解,术语第一、第二等仅用于区分描述,而不能理解为指示或暗示相对重要性。尽管本文可以使用术语第一、第二等等来描述各种单元,这些单元不应当受到这些术语的限制。这些术语仅用于区分一个单元和另一个单元。例如可以将第一单元称作第二单元,并且类似地可以将第二单元称作第一单元,同时不脱离本实用新型的示例实施例的范围。应当理解,本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,单独存在B,同时存在A和B三种情况,本文中术语“/和”是描述另一种关联对象关系,表示可以存在两种关系,例如,A/和B,可以表示:单独存在A,单独存在A和B两种情况,另外,本文中字符“/”,一般表示前后关联对象是一种“或”关系。应当理解,在本实用新型的描述中,术语“上”、“竖直”、“内”、“外”等指示的方位或位置关系,是该实用新型产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。应当理解,当将单元称作与另一个单元“连接”、“相连”或“耦合”时,它可以与另一个单元直相连接或耦合,或中间单元可以存在。相対地,当将单元称作与另一个单元“直接相连”或“直接耦合”时,不存在中间单元。应当以类似方式来解释用于描述单元之间的关系的其他单词(例如,“在……之间”对“直接在……之间”,“相邻”对“直接相邻”等等)。在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。本文使用的术语仅用于描述特定实施例,并且不意在限制本实用新型的示例实施例。如本文所使用的,单数形式“一”、“一个”以及“该”意在包括复数形式,除非上下文明确指示相反意思。还应当理解术语“包括”、“包括了”、“包含”、和/或“包含了”当在本文中使用时,指定所声明的特征、整数、步骤、操作、单元和/或组件的存在性,并且不排除一个或多个其他特征、数量、步骤、操作、单元、组件和/或他们的组合存在性或增加。还应当注意到在一些备选实施例中,所出现的功能/动作可能与附图出现的顺序不同。例如,取决于于所涉及的功能/动作,实际上可以实质上并发地执行,或者有时可以以相反的顺序来执行连续示出的两个图。在下面的描述中提供了特定的细节,以便于对示例实施例的完全理解。然而,本领域普通技术人员应当理解可以在没有这些特定细节的情况下实现示例实施例。例如可以在框图中示出系统,以避免用不必要的细节来使得示例不清楚。在其他实施例中,可以不以非必要的细节来示出众所周知的过程、结构和技术,以避免使得示例实施例不清楚。实施例1:本实施例提供了一种变速省力吸收加速传动组件,如图1至图2所示:包括固定壳体,固定壳体1内设有储力弹性部件2、中空主力卡钩3、中空变速卡钩4和偏心传动机构,所述储力弹性部件2沿竖直方向伸缩,其顶部与固定壳体1固定连接,底部与中空主力卡钩3连接,中空主力卡钩3的底部设有主传动绳5,主传动绳5竖直连接在偏心传动机构的一端,所述中空变速卡钩4的顶部连接有卡钩回位弹力索6,卡钩回位弹力索6的顶端固定在储力弹性部件2旁,中空变速卡钩4的底部设有变速传动绳7,变速传动绳7的底端连接在偏心传动机构的另一端,所述中空主力卡钩3设有斜上的钩口,所述中空变速卡钩4设有斜下的钩口,中空主力卡钩3的钩口与中空变速卡钩4的钩口适配,所述偏心传动机构设在中空主力卡钩3和中空变速卡钩4下方,与固定壳体1形成转动连接,偏心传动机构用于通过偏心转动带动中空变速卡钩4卡接在中空主力卡钩3上,使储力弹性部件2和卡钩回位弹力索6共同向下拉伸,中空变速卡钩4套在主传动绳5上滑动。所述偏心传动机构包括变速偏心轮组和偏心轮传动臂11,所述偏心轮传动臂11位于变速偏心轮组下方,变速偏心轮组和偏心轮传动臂11均与固定壳体1转动连接,主传动绳5与偏心轮传动臂11连接,变速传动绳7与变速偏心轮组连接,偏心轮传动臂11与变速偏心轮组之间通过副传动绳10连接。所述变速偏心轮组包括两个偏心轮8和偏心轴9,两个偏心轮8通过偏心轴9形成偏心转动连接,偏心轴9与固定壳体1固定连接,所述偏心轮传动臂11包括一体式连接的第一转轮和第一力臂,第一转轮与固定壳体1固定连接,主传动绳5与副传动绳均连接在第一转轮上,使得第一转轮转动时,主传动绳5带动中空主力卡钩3向下移动,副传动绳带动两个偏心轮8转动;变速传动绳7与下方同侧的偏心轮8连接,副传动绳与另一个偏心轮8连接,使得第一转轮带动两个偏心轮8转动时,两个偏心轮8的转动方向相同,且两个偏心轮8的转动方向与第一转轮的转动方向相反。具体实施时,通过外力作用于偏心轮传动臂11,偏心轮传动臂11通过主传动绳5和中空主力卡钩3拉伸储力弹性部件2获得平稳的吸收过程,同时通过副传动绳、变速偏心轮组、变速传动绳7和中空变速卡钩4拉动卡钩回位弹力索6,中空主力卡钩3和中空变速卡钩4逐渐统一移动轨迹,直至中空主力卡钩3和中空变速卡钩4相互配合卡接在一起,此时,通过偏心传动机构可将省力比控制在较高的范围内,所以储力弹性部件2和卡钩回位弹力索6的弹力可以得到有效存储,当需要释放时,释放出来的力会较大,当弹力释放完,中空变速卡钩4通过卡钩回位弹力索6的作用从中空主力卡钩3上拉脱,这样就完成一个循环。实施例2:作为对上述实施例的优化,如图3至图5所示,所述偏心传动机构还可以为一体式连接的第二力臂12、第二转轮13和转矩角14,转矩角14设于第二转轮13外侧,且转矩角14的尖角竖直向上,主传动绳5与转矩角14的尖角顶端连接,变速传动绳7与第二转轮13连接,第二转轮13用于带动转矩角14朝靠近变速传动绳7的一侧转动,第二力臂12一端对接第二转轮13,另一端转动连接有辅助转动件15。具体实施时,通过外力作用于辅助转动件15,辅助转动件15转动到位后将力作用于第二力臂12、第二转轮13和转矩角14,转矩角14通过主传动绳5和中空主力卡钩3拉伸储力弹性部件2获得平稳的吸收过程,同时通过第二转轮13、变速传动绳7和中空变速卡钩4拉动卡钩回位弹力索6,中空主力卡钩3和中空变速卡钩4逐渐统一移动轨迹,直至中空主力卡钩3和中空变速卡钩4相互配合卡接在一起,此时,通过偏心传动机构可将省力比控制在较高的范围内,储力弹性部件2和卡钩回位弹力索6共同存储的弹力较大,当需要释放时,释放出来的力也较大,当弹力释放完,中空变速卡钩4通过卡钩回位弹力索6的作用从中空主力卡钩3上拉脱,这样就完成一个循环。实施例3:作为对上述实施例的优化,所述储力弹性部件2和卡钩回位弹力索6为弹簧或者皮筋。所述储力弹性部件2包括两根弹簧和一根皮筋,中空主力卡钩3通过皮筋与固定壳体1连接,在皮筋两侧设连接开关,两根弹簧与皮筋通过连接开关连接。其应用时,可通过连接开关将两根弹簧和皮筋绑定在一起,以用于存储更大的弹力,不需要时,也可将连接开关打开,将两根弹簧从皮筋上解绑。本实用新型不局限于上述可选的实施方式,任何人在本实用新型的启示下都可得出其他各种形式的产品。上述具体实施方式不应理解成对本实用新型的保护范围的限制,本实用新型的保护范围应当以权利要求书中界定的为准,并且说明书可以用于解释权利要求书。

企业营业执照
专利注册证原件
身份证
个体户营业执照
身份证
专利注册证原件
专利代理委托书
转让申请书
转让协议
手续合格通知书
专利证书
专利利登记簿副本




提交

公众号
全国技术转移公共服务平台