- 技术(专利)类型 发明专利
- 申请号/专利号 CN201310115722.7
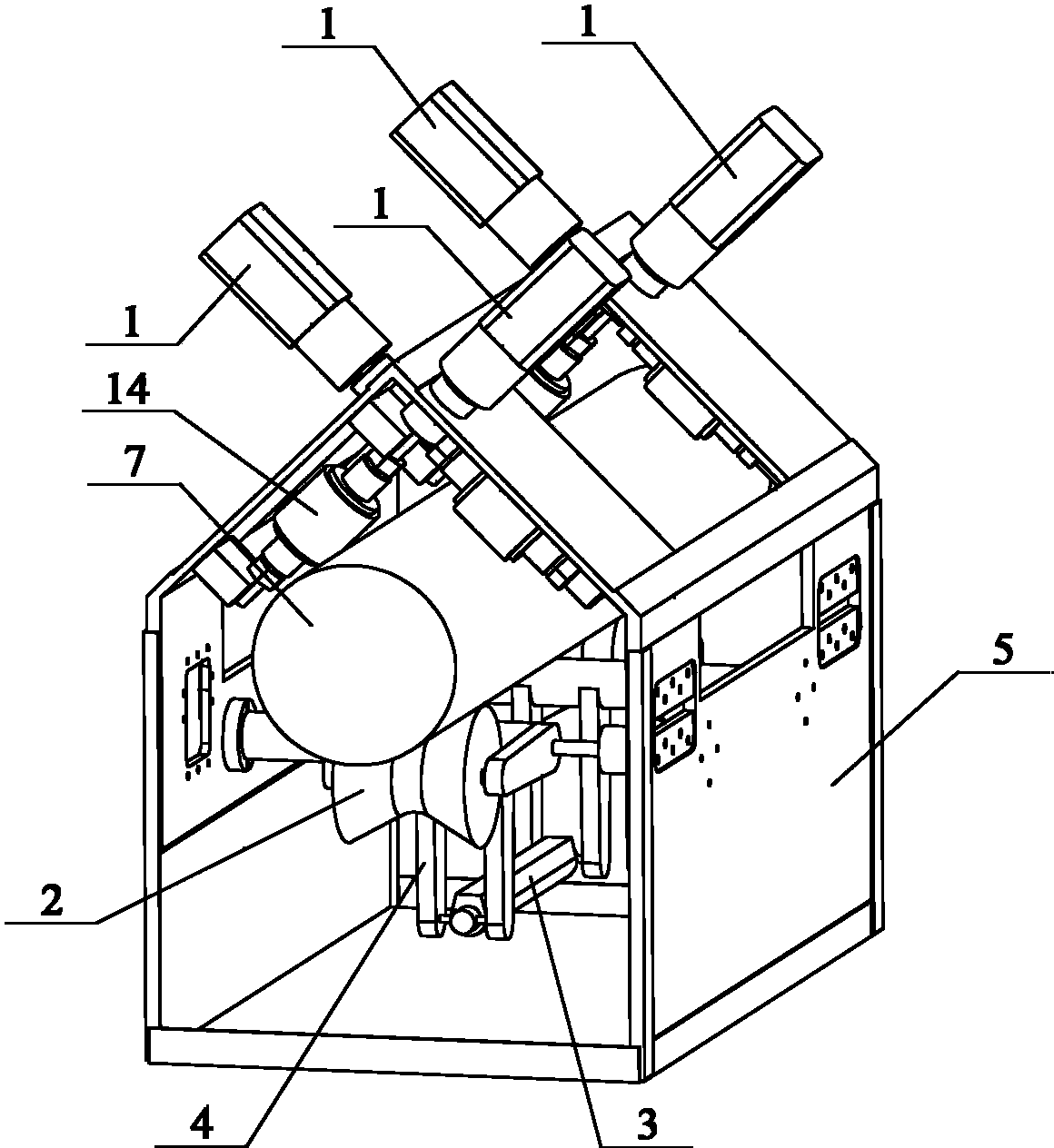
- 技术(专利)名称 桥梁缆索的检测系统
- 项目单位 中铁大桥局集团武汉桥梁科学研究院有限公司 中铁大桥局集团有限公司
- 发明人 汪正兴 王波 王翔 柴小鹏 叶觉民 黄清 侍刚 蔡欣 朱治宝 刘德清 叶翔 袁建新 马远刚
- 行业类别 固定建筑
- 技术成熟度 未知
- 交易价格 ¥面议
- 联系人 中铁大桥局集团武汉桥梁科学研究院有限公司 中铁大桥局集团有限公司
- 发布时间 2017-01-18
 北京
北京
客服热线:010-83278899
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们