
- 技术(专利)类型 发明专利
- 申请号/专利号 201210078513.5
- 技术(专利)名称 对彩色数字图像进行视觉立体感知增强的方法及系统
- 项目单位
- 发明人 侯克杰
- 行业类别 人类生活必需品
- 技术成熟度 正在研发
- 交易价格 ¥面议
- 联系人 冯爽
- 发布时间 2020-11-02
 北京
北京
客服热线:010-83278899
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们
 北京
北京
客服热线:010-83278899
微信公众号 扫一扫 关注我们

项目简介
本发明涉及数字图像处理领域,具体涉及对彩色数字图像进行视觉立体感知增强的方法及系统。本发明的技术方案提取图像中的单目深度信息,并以真实景物的观察效果为目标仿真计算单目深度信息增强。结果,图像像素颜色的视觉感知亮度值仿真变换为新值,视觉感知饱和度和色相不变,图像的视觉感知空间感和景物的立体感显著增强。
说明书
技术领域
本发明涉及数字图像处理领域,具体涉及对彩色数字图像进行视觉立体感知增强的方法及系统。
背景技术
二十世纪中期以来,对人类视觉特性的研究取得了重要进展。视觉是人类了解世界的一种重要功能。视觉包括“视”和“觉”,称之视感觉和视知觉。视感觉主要是从分子的观点来理解人们对光(可见辐射)反应的基本性质(如亮度、颜色),它主要涉及物理、化学等。视知觉主要论述人们从客观世界接受视觉刺激后如何反应及反应所采用的方式。它研究如何通过视觉形成人们关于外在世界空间的表象,所以兼有心理因素。视知觉是一个复杂过程,在很多情况下,只依靠光投射到视网膜上形成的视网膜图像和人们已知的眼或神经系统的机制还难以把全部知觉过程解释清楚。人们利用视觉所感知的客观事物具有多种特性,对它们形成的光刺激,人类的视觉系统会产生不同形式的反应,所以视知觉又被分成亮度知觉、颜色知觉、空间知觉等。研究已经确定了一些特性与刺激的物理量相关,如亮度依赖于光的强度,颜色依赖于光的波长;但也有些特性,如空间特性,还未完整得到与物理量的确定对应关系。视觉感知特性研究发现,人们在观察图像时会同时将图像感知为一个平面的一部分和一个三维空间的一部分。这一基本的心理现象称为图像双重感知真实性(double perceptual reality of images),是一种空间知觉特性。空间知觉的问题本质是深度感知的问题。人类没有专门用来感知距离的器官,对空间的感知常常不仅靠视力,还需要借助一些称为深度线索的外部条件和自身机体的内部条件来帮助判断物体的空间位置。这些线索包括非视觉性深度线索、双目深度线索和单目深度线索等。人对空间场景的深度感知主要依靠非视觉性深度线索和双目视觉实现。双眼视差是产生立体知觉和深度知觉的主要原因之一。但目前对于已经由单镜头光学系统成像的二维图像,发现其中真实的双目视觉深度线索,并以单目深度线索的方式增强显示在图像中的努力尚在进行中。人对空间场景的深度感知也可在一定程度依靠单目视觉实现。在单目视觉中刺激物本身的一些物理条件,在适当应用条件下也可以成为知觉深度和立体感的线索。这些线索中的部分是由成像光学系统特性产生的,如,景物大小和距离,线性透视等。另外由于成像环境光线的变化产生的视知觉,如,光亮与阴影分布,即明亮度物体显得近,灰暗的物体显得远;颜色分布,即蓝色物体显得远,红、黄色物体显得近;大气透视,即近处物体显得清楚,远处物体不清楚等。如能对这些线索进行量化和仿真计算,对二维图像增强景物之间深度(空间)感知和物体自身立体感知应该是很有帮助的,遗憾的是,此前对这些感知仅有定性的表述,还未与相关物理量建立对应关系,还不能直接指导彩色数字图像增强立体感的计算。研究发现,增加图像的视觉感知清晰度可以在一定程度增强图像视觉感知立体感。一些计算机程序具有这种功能,典型如Adobe Photoshop CS4。在滤镜(Filter)的智能锐化(Smart Sharpen)选项,可以计算图像的每一像素与相邻像素的颜色差,并将差值的一部分用来改变自身的颜色值,达到增加图像清晰度的目的。在此选项中,可以设置相邻像素的范围(Radius),颜色差值的利用比例(Amount),锐化前对像素进行预处理的方式(Remove),还可以对高光(Highlight)和暗调(Shadow)的渐隐量(Fade Amount)、色调宽度(Tonal Width)和范围(Radius)进行选择设置。业界普遍认为,该程序的锐化功能能够显著增强图像的清晰度。但是,对于增强图像视觉深度感知的目标而言,目前软件的版本还缺乏相应的功能。例如,程序目前以图像像素的RGB三原色数值计算像素间颜色差值,这种增强像素颜色的方法,会在提高颜色的视觉感知亮度的同时,相应降低视觉感知饱和度和偏移视觉感知色相,锐化强度越高这种方法造成的视觉感知色调偏差就越明显。因此,仅就增加图像清晰度的目的而言,目前的方法也是应该并且能够改进的。另外,相邻像素的选择方式,未能与锐化图像中的环境光线特性相关,因此,图像清晰度的改变不能与深度感知密切相关,这是非常可惜的。还有,对图像锐化前的柔化处理选项还过于简单,不能根据需要而选择图像中不同内容进行柔化模糊处理,由此,图像的柔化效果在一定条件下限制了清晰度提升的程度,并且不能与图像的深度感知相关,同样非常可惜。
发明内容
为了解决上述问题本发明的发明人提出并完成了本发明。本发明的目的是提供对彩色数字图像进行视觉立体感知增强的方法。本发明的再一目的是提供对彩色数字图像进行视觉立体感知增强的系统。典型彩色数字图像是可见光颜色空间中的真实景物在成像平面的二维投影。由于成像设备的实际颜色空间相比可见光颜色空间小很多,因此成像的二维图像的视觉感知真实性与对真实景物的感知相比也相差了很多,其中就包括空间深度感知和景物立体感知。因此,本发明的技术方案提取图像中的单目深度信息,并以真实景物的观察效果为目标计算单目深度信息增强。结果,图像像素颜色的视觉感知亮度值变换为新值,图像视觉感知的空间感和景物的立体感显著增强。本发明的方法属于“史诗颜色二TM”(SecondEposColorTM),简称“诗色二TM”(SECrTM),主要是为增强图像视觉感知空间深度感和景物立体感而调整每一像素的视觉感知亮度数值。调整量取决于多种条件,其中包括,像素自身的颜色视觉感知亮度值,真实景物成像环境中入射光线在成像平面的投影,在光线入射方向上的相关相邻像素颜色视觉感知亮度值,具有彩色灰度能力的像素颜色的视觉感知色相的视觉感知彩色灰亮度当量值以及视觉感知饱和度的视觉感知彩色灰亮度当量值等。根据本发明的方法,图像的每一像素颜色在调整了视觉感知亮度值的同时,保持了视觉感知饱和度和视觉感知色相值不变,图像像素之间的颜色视觉感知亮度差与自身亮度成比例显著增强,即视觉感知亮度差对比度显著增强,因此,图像的视觉感知空间感和景物立体感显著增强。本发明的方法和系统可用于摄影、摄像、电影、电视、视频游戏等自然景物成像或由计算机生成的图像,即任何由红、绿和蓝三原色合成颜色的图像及设备。对于典型由红、绿和蓝三原色合成颜色的数字图像,根据本发明的方法,经调整每一像素颜色的视觉感知亮度值后,由检查原始图像对比调整后图像的亮度值,可以看出相邻像素的颜色视觉感知亮度差对比度变化幅度平均约为50%,变化幅度可以由设置的幅度系数调控,同时也受到设置的亮度变化绝对值允许范围的控制。据研究报告,眼睛对亮度敏感范围很大,为10-6-107cd/m2(坎[德拉]每平方米)。但在实际生活中的任何时刻,人眼所感受到的最大和最小亮度之比很少超过100。这个最小和最大亮度范围在光亮的房间中为1-100cd/m2,在室外为10-1000cd/m2,在晚上为0.01-1cd/m2。因此,根据本发明的方法对可见光颜色空间和彩色图像颜色空间的视觉感知颜色亮度均进行归一化计算,使用各自空间最大亮度为基数,同样线性变换各自的亮度参数到0-100范围。在此条件下,根据本发明的技术方案,对以上二空间使用相同的颜色视觉感知模式表述亮度,以图像颜色亮度的动态范围记录可见光颜色亮度动态范围中颜色亮度变化。假定颜色空间是圆形,已知彩色数字图像典型sRGB颜色空间在CIExyY空间的xy色品平面的投影面积大约相当于光谱轨迹投影面积的35%,设R1为图像颜色空间色品范围直径,R2为光谱轨迹色品范围直径,表示两投影面积比例:(R1/2)2×π=0.35×(R2/2)2×π,得到R1=0.59R2,在圆形颜色空间情况下,两空间色品的动态范围比例与亮度动态范围比例相同,因此可假定sRGB颜色空间的图像颜色视觉感知亮度动态范围大体相当于可见光颜色的59%。SECr算法计算典型图像相邻像素的颜色视觉感知亮度差变化幅度平均50%的情况下,已经显著接近可见光颜色空间视觉感知亮度差对比度特性,因此对图像的视觉空间感知和景物立体感知可以显著接近对真实环境的空间感知和真实景物的立体感知。根据本发明的技术方案,选择应用的图像单目深度信息之一是像素间颜色视觉感知亮度的差值。因为人们从物体表面感知的亮度基本是由它与周围环境(特别是背景)的关系所决定的。如果两个物体与它们各自背景有相似的亮度差,那么它们看起来就有相似的亮度。这一选择也有利于应用颜色空间亮度动态范围的归一化计算结果。如上所述,图像双重感知真实性对于彩色数字图像深度感知增强计算的指导意义在于,如将图像感知为具备三维真实性,必须仔细重构图像,需要尽可能模仿自然视域的有用特性。本发明将以上描述的成像环境光线变化产生的视知觉,以彩色数字图像的视觉感知亮度为主,视觉感知色相和饱和度为辅,建立多种模型,作为图像单目深度信息来调控像素颜色视觉感知亮度值,例如:模型1,入射光线对景物的立体感知的影响模型。真实景物成像环境的照射光线,是形成景物立体感和景物间空间位置感知的重要因素之一。入射光线和从景物表面反射光线夹角的变化可以表示照射位置的表面形状。观察者感知的景物表面亮度与观察视角和反射光线夹角相关,夹角越小感觉越亮。物体表面的亮度变化形成对物体的立体感知,而入射光线是形成物体表面亮度变化的主要条件。模型1以入射光线在图像平面的投影为基准,以图像像素在入射方向相邻和两侧边沿近邻为条件选择相关像素,最多选择三个相关像素表示入射光线的平行特性。计算图像每一像素分别与此三个相关像素的颜色视觉感知亮度差,每一差值再由SECr算法设置的各自的系数加权以体现其相关度,即体现表面亮度与表面形状的相关度。SECr算法还设置对亮度差值之和的实际利用系数,以适应不同特性的图像增强立体感知的需要。应用模型1,图像中入射光线强度看起来显著增强,景物的空间感和立体感也随之显著增强。模型2,像素颜色视觉感知亮度值对空间感知的影响模型。如上描述的成像环境照明光线产生的视知觉,分别涉及景物的亮度和清晰度,模型2将此二者关联,即将图像像素的亮度值与模型1计算的像素间亮度差值之和相关。在照明光线与观察同向入射条件下,SECr算法结果是,像素颜色亮度值越高,则应用以上亮度差值之和的比例越高,使像素颜色亮度值改变越多,当比相关像素亮则计算增加亮度,比相关像素暗则计算降低亮度。模型2将像素间亮度差对比度的改变相关于单目深度线索之一的像素亮度,图像中亮度值相对较高的景物清晰度提升较多,因此就显得越近,反之就显得越远,图像中景物的视觉空间感知显著增强。在逆光条件下的相关性正好相反,结果是亮度越高清晰度越低因此就显得越远。在照明光线近似垂直入射的条件下,具有在SECr算法中设置的亮度值的图像像素应用了亮度差值之和的最高比例量,因此景物的清晰度最高而显得最近,由此分别到最亮和最暗的亮度区间中像素对亮度差值之和的应用比例依次递减,因此图像中最亮和最暗的景物看起来都显得相对较远。模型3,像素颜色视觉感知亮度中的彩色灰度量影响模型。如上所述,SECr算法中以CIELAB空间的L、C和h分别表示颜色视觉感知亮度、饱和度和色相角。以前研究一般认为在明视觉下视杆细胞不起作用。最近的研究报告,视杆细胞在500cd/m2左右仍有活动,相信随着科技的发展,颜色视觉模型将会进一步完善。本发明的技术方案,彩色图像颜色的视觉感知亮度L值,由两部分感知亮度组成,即中性灰亮度和彩色灰亮度。中性灰亮度范围大约相当于由人眼视杆细胞(rod)响应生成的暗视觉全部和由红绿蓝三色视锥细胞(cone)响应生成的明视觉的中、低区间部分。彩色灰亮度范围是红绿蓝三色视锥细胞响应生成的明视觉的高端部分,即比较靠近光谱光视效率曲线的部分,对于彩色数字图像而言,其为LCmaxh1以上亮度部分。根据本发明的技术方案计算出各色相位面上彩色灰亮度范围是不同的,所以在模型3中,利用色相位面彩色灰亮度范围归一化计算结果,作为视觉感知色相的视觉感知彩色灰亮度当量值。以像素颜色彩色灰亮度值与彩色灰亮度范围的比值乘以上述彩色灰亮度当量值的方程式,作为模型3的子模型1,表示图像颜色视觉感知亮度中由感知色相主导的彩色灰亮度贡献份额,实现上述的成像环境光线变化产生的视知觉中的颜色分布特性,即蓝色物体显得远,红、黄色物体显得近的定性描述转换为量化描述。用CIE(International Commission on Lumination国际照明委员会)推荐的标准方法将孟赛尔新标系统颜色样本的CIE xyY参数转换为CIELAB空间色相h、亮度L和饱和度C数值,可见同一亮度序列中样本颜色饱和度值越高颜色看起来显得越亮,虽然它们的视觉感知亮度L值是相同的。因此,对于彩色数字图像,本发明的技术方案计算彩色灰亮度范围中的像素颜色视觉感知饱和度值与其所在亮度序列最大饱和度之比,作为视觉感知饱和度的视觉感知彩色灰亮度当量值。以此当量值乘以其视觉感知彩色灰亮度值与彩色灰亮度范围之比的方程式,作为模型3的子模型2,表示图像颜色视觉感知亮度中由感知饱和度主导的彩色灰亮度的贡献份额,实现上述的成像环境光线变化产生的视知觉中的光亮与阴影分布特性,即一般明亮的物体显得近,灰暗的物体显得远的定性描述转换为量化描述。模型3的子模型1和子模型2计算像素颜色的彩色灰亮度差的调整量,与模型2计算的像素颜色的中性灰亮度差调整量共同构成图像颜色视觉空间感知和景物立体感知对真实景物的仿真。通过本发明的技术方案,图像视觉感知清晰度和立体感同时显著增强。但是,实际部分图像内容不需要显著清晰,例如对于以人像为主要内容的图像,毛孔、汗毛等显著清晰可能产生相反效果,因此本发明的技术方案还包括对图像特定内容进行选择性柔化的算法模块。柔化计算使用以目标像素为中心的5×5像素模板,类高斯分布加权的卷积平均算法,调整目标像素视觉感知亮度参数。调整量与多种条件和设置相关,包括:SECr算法中设定的像素之间视觉感知亮度差的阈值;目标像素的近邻像素,即模板中目标像素的邻圈像素(共8个)亮度低于阈值的像素卷积阈值;模板中目标像素的外圈像素(共16个)亮度低于阈值的像素卷积阈值;SECr算法中设定的特定内容的像素颜色视觉感知色相区间;设定的像素颜色视觉感知饱和度阈值;设定的对以上计算的的像素颜色视觉感知亮度调整量的实际使用比例值等。模板采用的类高斯分布加权系数,是在典型高斯分布的基础上根据SECr算法设计使用的阈值设置而调整设置的。仅使用颜色的视觉感知亮度值进行柔化卷积计算,是本发明的主要技术特性,也是相比其它柔化算法具有显著优势的原因之一。根据本发明的对彩色数字图像进行视觉立体感知增强的方法包括以下步骤:(1)计算显示彩色数字图像的设备的视觉感知空间的360个色相位面的颜色边界,提取边界上饱和度CmaxL1和最大饱和度Cmaxh1及其亮度LCmaxh1;(2)正向变换彩色数字图像像素颜色R、G和B数值为CIELAB空间的L、C和h数值,其中,h为色相角,L为亮度、C为饱和度;(3)确定真实景物成像条件下的入射光线在彩色数字图像中的投影位置,设置目的像素的入射光线强度当量A1,数值范围0.0-1,典型0.4-0.6,入射光线两边对称位置的并行光线强度当量A1_1和A1_2,分别表示该位置像素亮度与目的像素亮度的相关性:A1_1=(1-A1)×[(90-α)/90]A1_2=1-A1-A1_1其中,α为入射光线在图像上的投影与垂线的夹角;(4)计算目的像素与相关像素间的亮度差值ΔLi,j,在目的像素的入射光线及其两边对称方向选择的像素为相关像素,计算它们与目的像素间的亮度差ΔLi,j,典型包括:左上方入射光线条件下计算:ΔLi,j=(LAi,j-LBi-1,j-1)×A1+(LAi,j-LBi,j-1)×A1_1+(LAi,j-LBi-1,j)×A1_2正上方入射光线条件下计算:ΔLi,j=(LAi,j-LBi,j-1)×A1+(LAi,j-LBi-1,j)×A1_1+(LAi,j-LBi+1,j)×A1_2右上方入射光线条件下计算:ΔLi,j=(LAi,j-LBi+1,j-1)×A1+(LAi,j-LBi,j-1)×A1_1+(LAi,j-LBi+1,j)×A1_2其中,Ai,j表示图像中目的像素,即调控亮度的像素,LAi,j表示该像素亮度;中心像素Ai,j四周共8个像素,自左上角顺时针排列分别为:Bi-1,j-1,Bi,j-1,Bi+1,j-1,Bi+1,j,Bi+1,j+1,Bi,j+1,Bi-1,j+1,Bi-1,j,LBi-1,j-1至LBi-1,j表示相应像素亮度,入射光线条件设定8种,即入射光源自左上、正上、右上、正右、右下、正下、左下和正左;(5)计算像素颜色视觉感知亮度表现的景物空间感知当量DLi,j(5-1)与观察同向光照条件下,DLi,j=(LAi,j/100)(5-2)与观察逆向光照条件下,DLi,j=(1-LAi,j/100)(5-3)与观察近似垂直光照条件下,设置LZH为目标亮度,即获得最高视觉感知清晰度的亮度值,数值范围50-95,典型75-85,如果LAi,j≥LZH,DLi,j=(100-LAi,j)/(100-LZH)如果LAi,j<LZH,DLi,j=LAi,j/LZH。(6)计算像素颜色视觉感知亮度调控后亮度LTi,jLTi,j=LAi,j+ΔLi,j×DLi,j×KL其中,KL为设置的调控比例系数,数值范围0.0-3.0,典型1.0-2.0。(7)计算像素颜色视觉感知亮度的彩色灰亮度当量,(7-1)计算像素颜色视觉感知色相的彩色灰亮度当量DCAIx和调控后亮度LT2i,j,对显示彩色数字图像设备0°-359°各色相位面的LCmaxh1以其中最大值为基数进行归一化计算,得到相应色相位面的彩色灰亮度当量DCAIx,像素颜色视觉感知亮度大于LCmaxh1则计算调控亮度:LT2i,j=LTi,j+((LAi,j-LCmaxL1)/(100-LCmaxL1)×DCAIx)×KT2其中,KT2为设置的调控系数,数值范围0.0-3.0,典型1.0-2.0;(7-2)计算像素颜色视觉感知饱和度的彩色灰亮度当量DBAOx和调控后亮度LT3i,j像素颜色视觉感知亮度大于LCmaxh1则计算像素颜色视觉感知饱和度CAi,j的彩色灰亮度当量DBAOx:DBAOx=(CAi,j/CmaxL1)计算调整后亮度:LT3i,j=LT2i,j+((LAi,j-LCmaxL1)/(100-LCmaxL1)×DBAOx)×KT3其中,KT3为设置的调控系数,数值范围0.0-3.0,典型1.0-2.0。(8)将像素颜色的色相h、饱和度C和计算调控后的LT3i,j或LTi,j数值逆向变换为sRGB空间R、G和B数值和规范化。根据本发明的方法还包括选择图像中需柔化内容的颜色视觉感知色相区间和设置相关调控系数的步骤:11设置彩色数字图像柔化内容所在视觉感知色相区间的高端边界HGX和低端边界HDX,及区间两边外沿的过渡区宽度KHGX和KHDX,HGX和HDX数值范围0-359°,KHGX和KHDX数值范围0-20,典型10,色相区间的高端过渡区的外沿色相值:HWGX=HGX+KHGX,低端:HWDX=HDX-KHDX,只对指定色相区间内的颜色保留规范柔化计算结果,对过渡区内颜色因计算柔化得到的视觉感知亮度调整量,从色相区间边界到外边沿计算调整量平滑变化到0;1.2设置颜色视觉感知饱和度比例高限阈值CGAOX和高端过渡区宽度系数BICX1,CGAOX数值范围0.40-0.80,典型0.60-0.70,BICX1数值范围0.00-1,典型0.10,只对以上指定色相区间内并且饱和度比例值在阈值CGAOX以下的颜色保留规范柔化计算结果,对饱和度比例在CGAOX到CGAOX+BICX1的颜色因计算柔化得到的视觉感知亮度调整量,从CGAOX到CGAOX+BICX1计算调整量平滑变化到0;1.3设置柔化卷积模板及相关像素权重,以柔化像素为中心的5×5像素作为柔化卷积模板,Li,j表示中心像素,即柔化像素,以下标i,j表示模板上像素位置,i表示列,j表示行,像素权重分别设置为:Li-2,j-2为2,Li-1,j-2为1,Li,j-2为2,Li+1,j-2为1,Li+2,j-2为2,Li-2,j-1为1,Li-1,j-1为4,Li,j-1为4,Li+1,j-1为4,Li+2,j-1为1,Li-2,j为2,Li-1,j为4,Li,j为8,Li+1,j为4,Li+2,j为2,Li-2,j+1为1,Li-1,j+1为4,Li,j+1为4,Li+1,j+1为4,Li+2,j+1为1,Li-2,j+2为2,Li-1,j+2为1,Li,j+2为2,Li+1,j+2为1,Li+2,j+2为2;1.4设置模板上相关像素间颜色视觉感知亮度差阈值LYU,LYU数值范围0-100,典型2-6,模板中心像素与另外像素的亮度差小于LYU则记该像素为有效像素;1.5设置模板上有效像素卷积阈值SN和SW设置与中心像素相邻像素的有效像素的卷积阈值SN,数值范围0-32,典型24-28,梯度4,设置与中心像素相隔像素的有效像素的卷积阈值SW,数值范围0-24,典型10-14,梯度1或2,当相邻像素的有效像素卷积值大于SN并且相隔像素的有效像素卷积值大于SW,则计算模板有效像素卷积平均值作为中心像素的亮度值LJpi,j;1.6设置像素视觉感知亮度调整量实际应用的比例系数BJX1,BJX1数值范围0.00-1,典型0.10-0.30,LYONGj,i=LJpi,j j+(LAi,j-LJpi,j)×BJX1其中,LYONGj,i为中心像素实际应用的亮度值。根据本发明的彩色数字图像进行视觉立体感知增强的系统包括:(1)显示彩色数字图像的设备颜色视觉感知空间色相位面颜色边界计算模块,包括:(1-1)设备颜色空间的红、绿和蓝三原色值变换为CIELAB空间L、C和h值计算单元;(1-2)设备颜色视觉感知空间色相位面颜色边界提取单元;(1-3)色相位面颜色边界CmaxL1平滑单元。(2)彩色数字图像像素颜色RGB模式正向转换及归并色相位面和亮度序列模块,包括:(2-1)将彩色数字图像像素颜色RGB三原色值转换为CIELAB空间的亮度L、饱和度C和色相角h值的计算单元。(2-2)像素颜色色相位面和亮度序列归并单元,将图像颜色空间划分为360个基准色相位面,以色相h值四舍五入归并进入相应基准色相位面,将色相位面中亮度L范围划分为101个基准序列,以亮度L值四舍五入归并进入相应亮度序列。(3)彩色数字图像选择性柔化计算模块,包括:(3-1)柔化内容初选单元,读取系统中设置的柔化颜色的色相区间边界HGX和HDX以及区间两边外沿的过渡区宽度KHGX和KHDX,读取设置的柔化颜色的饱和度比例高限阈值CGAOX和高端过渡区宽度系数BICX1,将符合条件的像素颜色导入柔化计算精选单元;(3-2)柔化内容精选和计算单元,读取系统中设置的卷积模板相关像素间亮度差阈值LYU,读取有效像素卷积阈值SN和SW,应用系统中设置的柔化模板和像素加权,对符合条件的像素计算柔化亮度LJpi,j并导入柔化应用计算单元;(3-3)柔化亮度应用计算单元,读取系统中设置的亮度调整量实际应用比例系数BJX1,将计算调整后的亮度值LYONGj,i代替像素原有亮度值LAi,j。(4)彩色数字图像像素颜色亮度增强计算模块,包括:(4-1)设置实际景物成像环境中入射光线在图像上投影及与目的像素亮度相关像素作用当量计算单元,设置目的像素的入射光线强度当量A1,数值0.4-0.6,入射光线两边对称位置的并行光线强度当量A1_1和A1_2,A1_1=(1-A1)×[(90-α)/90]A1_2=1-A1-A1_1其中,α为入射光线在图像上的投影与垂线的夹角;(4-2)目的像素与相关像素间的亮度差值ΔLi,j计算单元,入射光线条件设定8种,即入射光源自左上、正上、右上、正右、右下、正下、左下和正左,目的像素与相关像素间的亮度差值ΔLi,j典型包括:左上方入射光线条件下计算:ΔLi,j=(LAi,j-LBi-1,j-1)×A1+(LAi,j-LBi,j-1)×A1_1+(LAi,j-LBi-1,j)×A1_2正上方入射光线条件下计算:ΔLi,j=(LAi,j-LBi,j-1)×A1+(LAi,j-LBi-1,j)×A1_1+(LAi,j-LBi+1,j)×A1_2右上方入射光线条件下计算:ΔLi,j=(LAi,j-LBi+1,j-1)×A1+(LAi,j-LBi,j-1)×A1_1+(LAi,j-LBi+1,j)×A1_2其中,Ai,j表示图像中目的像素,即调控亮度的像素,LAi,j表示该像素亮度;中心像素Ai,j四周共8个像素,自左上角顺时针排列分别为:Bi-1,j-1,Bi,j-1,Bi+1,j-1,Bi+1,j,Bi+1,j+1,Bi,j+1,Bi-1,j+1,Bi-1,j,LBi-1,j-1至LBi-1,j表示相应像素亮度,入射光线条件设定8种,即入射光源自左上、正上、右上、正右、右下、正下、左下和正左;(4-3)像素颜色视觉感知亮度表现的景物空间感知当量DLi,j计算单元,在与观察同向光照条件下:DLi,j=(LAi,j/100)在与观察逆向光照条件下:DLi,j=(1-LAi,j/100)在与观察近似垂直光照条件下:设置LZH为目标亮度,即获得最高视觉感知清晰度的亮度值,数值75-85,如果LAi,j≥LZH,DLi,j=(100-LAi,j)/(100-LZH)如果LAi,j<LZH,DLi,j=LAi,j/LZH;(4-4)像素颜色视觉感知亮度调控后亮度LTi,j计算单元,=LAi,j+ΔLi,j×DLi,j×KL以上,KL为设置的调控比例系数,数值1.0-2.0;(4-5)像素颜色视觉感知色相的彩色灰亮度当量DCAIx和调控后亮度LT2i,j计算单元,读取图像设备0°-359°各色相位面的LCmaxh1,以其中最大值为基数进行归一化,计算结果为相应相位面的彩色灰亮度当量DCAIx,比较像素颜色视觉感知亮度LAi,j大于LCmaxh1时计算调控亮度:LT2i,j=LTi,j+((LAi,j-LCmaxL1)/(100-LCmaxL1)×DCAIx)×KT2以上KT2为设置的调控系数,数值范围0.0-3.0,典型1.0-2.0;(4-6)像素颜色视觉感知饱和度的彩色灰亮度当量DBAOx和调控后亮度LT3i,j计算单元,比较像素颜色视觉感知亮度LAi,j大于LCmaxh1时计算像素颜色视觉感知饱和度CAi,j的彩色灰亮度当量DBAOx:DBAOx=(CAi,j/CmaxL1)计算调整后亮度:LT3i,j=LT2i,j+((LAi,j-LCmaxL1)/(100-LCmaxL1)×DBAOx)×KT3以上KT3为设置的调控系数,数值范围0.0-3.0,典型1.0-2.0。(5)将像素颜色的色相h、饱和度C和计算调控后的LT3i,j或LTi,j数值逆向变换为sRGB空间R、G和B三原色数值的计算模块。作为本发明的优选技术方案,设备颜色视觉感知空间色相位面颜色边界数据库先经由本发明系统中的设备颜色视觉感知空间色相位面颜色边界计算模块完成,计算包括:(1-1)设备颜色空间的红、绿和蓝三原色值变换为CIELAB空间L、C和h值的计算,由本发明系统中的设备颜色空间的红、绿和蓝三原色值变换为CIELAB空间L、C和h值计算单元执行:(1-2)设备颜色视觉感知空间色相位面颜色边界计算,由设备颜色视觉感知空间色相位面颜色边界提取单元执行:以0-359整数表示基准色相位面,以设备颜色色相h值四舍五入归并进入相应基准色相位面,并以0-100整数表示基准亮度序列,以L值四舍五入归并进入相应亮度序列,提取色相位面各亮度序列颜色最大饱和度值CmaxL1,作为该色相位面的颜色边界计算数据;(1-3)色相位面颜色边界平滑计算,由色相位面颜色边界CmaxL1平滑单元执行:提取色相位面中最大饱和度值Cmaxh1具有的亮度LCmaxh1到最低亮度L=0的亮度序列区间所对应的颜色边界,以标准线性插值算法计算平滑边界,弥补原亮度序列的最大饱和度CmaxL1非平滑递减或填补缺失。计算得到的颜色边界CmaxL1以及由亮度LCmaxh1到L=100的亮度序列区间对应的颜色边界CmaxL1,表示该色相位面的应用颜色边界。
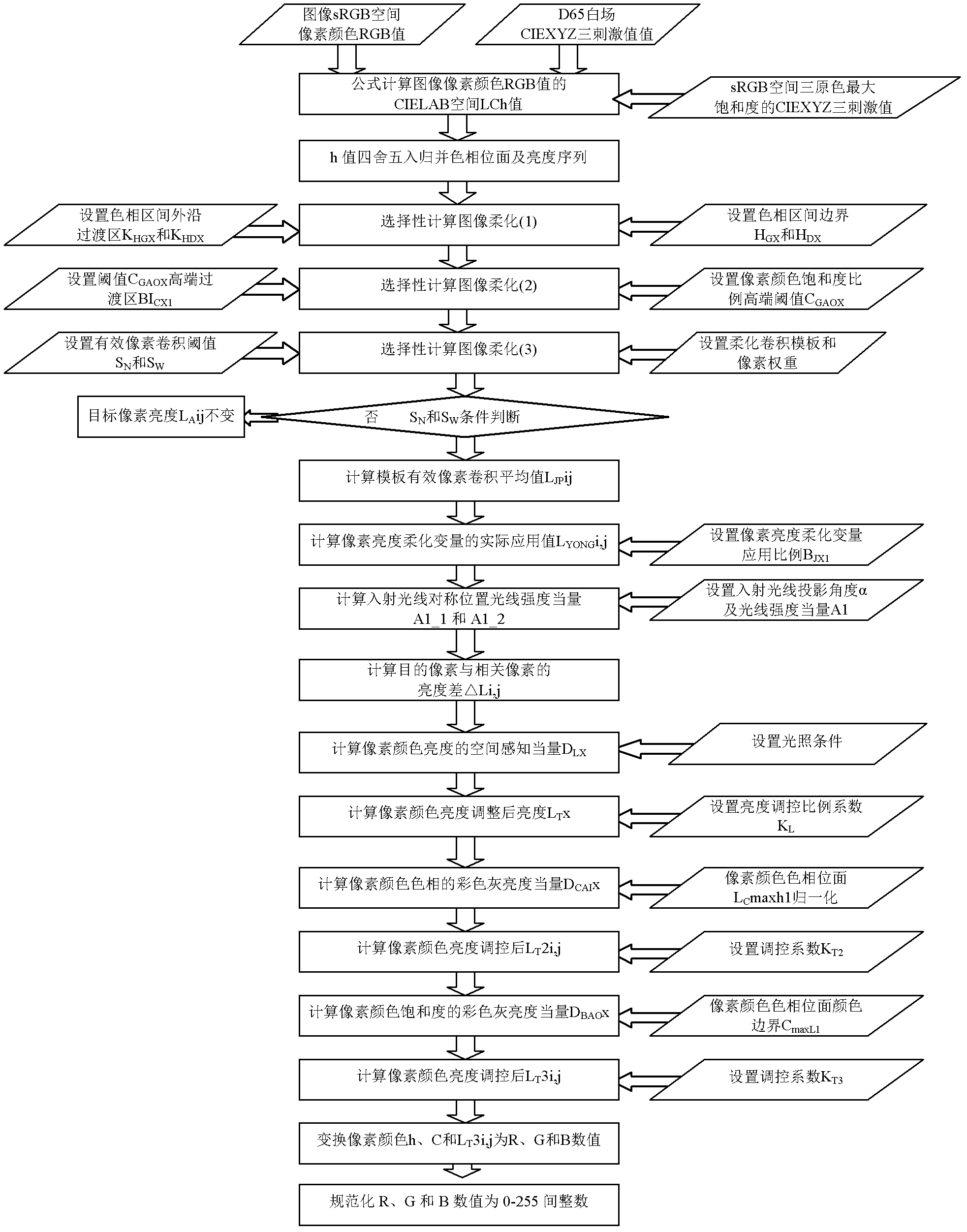
附图说明
图1显示了非标设备颜色视觉感知空间示例色相位面全部归并颜色坐标,中部灰线表示归并亮度序列算法,下部灰线表示以线性插值纠正相应亮度序列最大饱和度CmaxL1的非平滑递减及弥补缺失计算结果,横坐标饱和度C,纵坐标亮度L。图2-1显示了根据本发明的具体实施例的对彩色数字图像进行视觉立体感知增强的方法的流程图,说明了设备颜色视觉感知空间色相位面颜色边界计算流程。图2-2显示了根据本发明的具体实施例的对彩色数字图像进行视觉立体感知增强的方法的流程图,说明了彩色数字图像视觉感知亮度调控计算流程。图3为计算柔化卷积模板和像素权重。图4中的a、b分别显示了入射光线角度及相关像素亮度的相关性。图5,a标示像素位置,b标示左上方入射光线时的相关像素,c标示右上方入射光线时的相关像素。图6-1原稿图像,图6-2经本发明的方法处理后图像。图7-1原稿图像,图7-2经本发明的方法处理后图像。图8-1使用SECr算法计算机程序的典型系统流程。图8-2使用SECr算法IP的电视机典型系统流程。图8-3使用SECr算法ASIC的电视机典型系统流程。图8-4使用SECr算法ASIC的电子设备典型系统流程。
具体实施方式
实施例1实施本发明的彩色数字图像视觉立体感知增强流程。(1)计算显示彩色数字图像的设备颜色视觉感知空间色相位面颜色边界数据库。数据库经由本发明的系统中设备颜色视觉感知空间色相位面颜色边界计算模块运算完成,计算包括:(1-1)将设备颜色空间的红、绿和蓝三原色值变换为CIELAB空间L、C和h值的计算,由设备颜色空间红、绿和蓝三原色值变换为CIELAB空间L、C和h值计算单元执行:具有图像显示功能的电子设备典型为sRGB颜色空间和D65白场,sRGB空间RGB三原色色品查阅:xr,max=0.64 yr,max=0.33,xg,max=0.30 yg,max=0.60,xb,max=0.15 yb,max=0.06D65白场CIEXYZ三刺激值查阅:Xw=0.950456 Yw=1 Zw=1.089058由以上参数计算颜色RGB数值变换CIEXYZ三刺激值所需3×3矩阵系数:利用设备白场三原色的RGB值和CIEXYZ三刺激值正向变换公式:将3×3矩阵系数表示为三原色色品值与亮度值的乘积形式:由以上方程计算得到RGB三原色最大饱和度时的亮度值:Yr,max=0.2126 Yg,max=0.7152 Yb,max=0.0722应用以上结果计算得到矩阵3×3系数:应用以上矩阵系数计算设备颜色RGB三原色值到CIEXYZ空间X、Y和Z三刺激值的变换,再应用D65白场三刺激值计算颜色XYZ值到CIELAB空间L、C和h值变换。典型设备由红、绿和蓝三原色每种8位合成颜色,即23×8共16777216种颜色标量,依次由以上计算完成变换。非标设备计算白场和红、绿和蓝三原色最大饱和度时的CIEXYZ三刺激值:使用标准分光光度仪,按照常规规范测量设备白场三刺激值Xw’、Yw’和Zw’,计算白场归一化系数K1:K1=100/Yw’计算设备白场的CIEXYZ三刺激值:Xw=Xw’×K1,Yw=Yw’×K1,Zw=Zw’×K1使用标准分光光度仪,按照常规规范分别测量设备红、绿和蓝三原色最大饱和度条件下的三刺激值,Xr’、Yr’和Zr’,Xg’、Yg’和Zg’,Xb’、Yb’和Zb’,再分别计算三原色的CIEXYZ三刺激值:Xr,max=Xr’×K1,Yr,max=Yr’×K1,Zr,max=Zr’×K1Xg,max=Xg’×K1,Yg,max=Yg’×K1,Zg,max=Zg’×K1Xb,max=Xb’×K1,Yb,max=Yb’×K1,Zb,max=Zb’×K1用以上计算得到的三原色最大饱和度时CIEXYZ三刺激值,替代以上所述标准方法中的3×3矩阵系数,以计算得到的白场CIEXYZ三刺激值替代以上所述设备标称白场CIEXYZ三刺激值,应用以上所述标准方法,依次将共16777216种颜色的R、G和B数值变换为CIELAB空间L、C和h数值。(1-2)设备颜色视觉感知空间色相位面颜色边界的计算,由设备颜色视觉感知空间色相位面颜色边界提取单元执行:以0-359整数表示基准色相位面,以设备颜色色相h值四舍五入归并进入相应基准色相位面,以0-100整数表示基准亮度序列,以颜色L值四舍五入归并进入相应亮度序列。提取色相位面各亮度序列中最大饱和度值CmaxL1,作为该色相位面的颜色边界计算数据。(1-3)色相位面颜色边界平滑计算,由色相位面颜色边界CmaxL1平滑单元执行:提取色相位面中最大饱和度值Cmaxh1具有的亮度LCmaxh1到最低亮度L=0的亮度序列区间所对应的颜色边界,以标准线性插值算法计算平滑边界,修整原亮度序列的最大饱和度CmaxL1非平滑递减或填补边界数据缺失。计算得到的此部分颜色边界CmaxL1连同由亮度LCmaxh1到L=100的亮度序列区间对应的颜色边界CmaxL1,表示该色相位面的最终应用颜色边界。色相位面颜色坐标及边界计算如图1所示。以上算法中所称的平滑,即颜色亮度序列由高到低排列,其饱和度CmaxL1小于以上序列且大于以下所有序列。饱和度值小于平滑计算值则改用计算值,大于计算值则不变。将以上计算结果存储为数据库。数据按照首序色相位面h次序亮度序列L排序,共36360行。以上步骤(1)计算流程如图2-1所示。(2)完成彩色数字图像的红、绿和蓝三原色值转换为CIELAB空间L、C和h值并归并入相应色相位面及亮度序列,由彩色数字图像像素颜色模式正向转换以及归并色相位面和亮度序列模块执行,计算包括:(2-1)彩色数字图像像素颜色RGB值转换为CIELAB空间的L、C和h值的计算,由彩色数字图像像素颜色RGB值转换为CIELAB空间的L、C和h值的计算单元执行:使用显示图像的设备标称或图像本身嵌入的白场和红、绿和蓝三原色相应参数,应用CIE推荐的标准算法,将图像像素的红、绿和蓝三原色表示的颜色转换为CIEXYZ三刺激值及CIELAB空间L、C和h值,算法程序及相关参数与步骤(1)相同。非标设备上显示图像需测量计算设备白场和红、绿和蓝三原色最大饱和度时的CIEXYZ三刺激值,算法程序及相关参数与步骤(1)相同。(2-2)像素颜色色相位面和亮度序列归并计算,由像素颜色色相位面和亮度序列归并单元执行:将图像颜色空间划分为0-359共360个基准色相位面,以色相h值四舍五入归并进入相应基准色相位面,将色相位面中亮度L范围划分为0-100共101个基准序列,以亮度L值四舍五入归并进入相应亮度序列,使像素颜色可用整数色相h和亮度L调用,但是仍保持h、L和C原有的8位浮点数据精度不变,这是精确计算亮度增强的保证之一,同时也是保持h、L和C数值逆向变换为RGB数值的精度要求。(3)选择性计算图像中相关内容颜色柔化。本发明的柔化算法主要用于肤色,首先以颜色色相选择肤色区间,再以区间中颜色饱和度值区分肤色,以目标像素与卷积模板中相关像素亮度差阈值判断有效像素数量并确定计算卷积平均值。选择性柔化计算包括:(3-1)设置彩色数字图像柔化内容所在视觉感知色相区间的边界HGX和HDX,以及区间两边外沿的过渡区宽度KHGX和KHDX,HGX设为90°,HDX设为340°可适合多数图像柔化需要。KHGX和KHDX均设为10,可实现柔化内容与不需柔化内容间亮度平滑变化。色相区间的高端过渡区的外沿色相值:HWGX=90°+10°,低端:HWDX=340°-10°。只对h≤90°或h≥340°色相位面内的颜色保留规范柔化卷积计算结果LJpi,j,过渡区90°-100°色相位面颜色中由计算柔化得到的视觉感知亮度调整量,从90°到100°计算调整量平滑变化到0。340°到330°色相位面同样计算亮度调整量平滑变化。(3-2)设置颜色视觉感知饱和度比例高限阈值CGAOX和高端过渡区宽度系数BICX1,CGAOX设为0.70,可包括多数肤色颜色,BICX1设为0.10,可基本实现柔化内容平滑过渡。只对以上指定色相区间内并且饱和度比例值在0.7以下的颜色保留规范柔化卷积计算结果LJpi,j,对饱和度比例在0.7到0.8的颜色计算柔化得到的视觉感知亮度调整量,从0.7到0.8计算调整量平滑变化到0。(3-3)设置柔化卷积模板及相关像素权重,设置以柔化像素为中心的5×5像素作为柔化计算模板,Li,j表示中心像素,以下标i,j表示模板上像素位置,i表示列,j表示行。像素权重设置主要与其距模板中心距离相关,权重设置为:Li-2,j-2为2,Li-1,j-2为1,Li,j-2为2,Li+1,j-2为1,Li+2,j-2为2,Li-2,j-1为1,Li-1,j-1为4,Li,j-1为4,Li+1,j-1为4,Li+2,j-1为1,Li-2,j为2,Li-1,j为4,Li,j为8,Li+1,j为4,Li+2,j为2,Li-2,j+1为1,Li-1,j+1为4,Li,j+1为4,Li+1,j+1为4,Li+2,j+1为1,Li-2,j+2为2,Li-1,j+2为1,Li,j+2为2,Li+1,j+2为1,Li+2,j+2为2。以上如图3所示。(3-4)设置模板上相关像素间颜色视觉感知亮度差阈值LYU本发明主要以计算像素间颜色视觉感知亮度的加权平均实现柔化图像中人物肤色的目标,像素间颜色视觉感知亮度差阈值LYU设置极为关键,设为3-5可适合大多数图像柔化的要求。模板中心像素与另外像素的亮度差小于LYU则记该像素为有效像素,记为计算柔化的根据之一,大于LYU的像素颜色一般为肤色以外内容,记为不计算柔化的根据之一。(3-5)设置模板上有效像素卷积阈值SN和SW和计算柔化设置与中心像素相邻像素的有效像素的卷积阈值SN为28,结果为相邻像素8个当中有两个及以上与中心像素亮度差大于阈值LYU就不计算柔化。设置与中心像素相隔像素的有效像素的卷积阈值SW为14,结果为相隔像素16个当中有5个及以上与中心像素亮度差大于阈值LYU就不计算柔化。计算模板上有效像素加权之和,即卷积计算,如结果大于SN和SW,则计算卷积的有效像素平均值作为中心像素柔化后的亮度值LJpi,j。设置阈值SN和SW,可适当区分肤色面积之上的其他图像内容使之免于柔化,例如眉毛、睫毛、头发和服饰等。(3-6)设置像素视觉感知亮度调整量实际应用的比例系数BJX1。为避免肤色经柔化计算后过于平滑而显得虚假,对经柔化计算改变的亮度值设置保留适当部分,BJX1设为0.15可适合大多数图像需要。LYONGj,i=LJpi,j j+(LAi,j-LJpi,j)×0.15其中,LYONGj,i为中心像素实际应用的亮度值。(4)计算图像像素颜色视觉感知亮度增强。(4-1)确定真实景物成像条件下的入射光线在彩色数字图像中的投影位置,设置目的像素的入射光线强度当量A1,数值0.4-0.6,入射光线两边对称位置的并行光线强度当量为A1_1和A1_2,表示该位置像素亮度与目的像素亮度的相关性:A1_1=(1-A1)×[(90-α)/90]A1_2=1-A1-A1_1其中,α为入射光线在图像上的投影与垂线的夹角。以上如图4所示。将图像颜色视觉感知亮度增强与真实景物成像环境的入射光线特性相关,是本技术发明的特点之一。(4-2)计算目的像素与相关像素间的亮度差值ΔLi,j,相关像素即目的像素入射光方向相邻像素及其两边对称方向近邻像素,计算它们与目的像素间的亮度差ΔLi,j,典型条件包括:左上方入射光线条件下计算:ΔLi,j=(LAi,j-LBi-1,j-1)×A1+(LAi,j-LBi,j-1)×A1_1+(LAi,j-LBi-1,j)×A1_2正上方入射光线条件下计算:ΔLi,j=(LAi,j-LBi,j-1)×A1+(LAi,j-LBi-1,j)×A1_1+(LAi,j-LBi+1,j)×A1_2右上方入射光线条件下计算:ΔLi,j=(LAi,j-LBi+1,j-1)×A1+(LAi,j-LBi,j-1)×A1_1+(LAi,j-LBi+1,j)×A1_2以上,Ai,j表示图像中目的像素,即调控亮度的像素,LAi,j表示该像素亮度;Bi-1,j-1至Bi+1,j+1共8个像素为相关像素,LBi-1,j-1至LBi+1,j+1表示相应像素亮度,入射光线条件设定8种,即入射光源自左上、正上、右上、正右、右下、正下、左下和正左。以上如图5所示。(4-3)计算像素颜色视觉感知亮度表现的景物空间感知当量DLx(4-3-1)与观察同向光照条件下:DLi,j=(LAi,j/100)(4-3-2)与观察逆向光照条件下:DLi,j=(1-LAi,j/100)(4-3-3)与观察近似垂直光照条件下:设置LZH为目标亮度,即获得最高视觉感知清晰度的亮度值,数值75-85,适合多数图像需要。如果LAi,j≥LZH,DLi,j=(100-LAi,j)/(100-LZH)如果LAi,j<LZH,DLi,j=LAi,j/LZH在准确设置入射光源条件下,将图像颜色亮度对比度调控量与颜色亮度相关,即图像清晰度提升与颜色的中性灰亮度值量化相关,实现以图像中景物清晰度不同表现景物所处空间深度不同及增强景物立体感的目的,设置对相关性的调整,可在一定程度改变对图像空间深度感知和景物立体感知。这也是本技术发明的特点之一。(4-4)计算像素颜色视觉感知亮度调控后亮度LTx,LTi,j=LAi,j+ΔLi,j×DLi,j×KL其中,KL为设置的调控比例系数,数值1.0-2.0。(4-5)计算像素颜色视觉感知亮度的彩色灰亮度当量(4-5-1)计算像素颜色视觉感知色相的彩色灰亮度当量DCAIx和调控后亮度LT2i,j,对显示彩色数字图像设备0°-359°各色相位面的LCmaxh1以其中最大值为基数进行归一化,得到各色相位面的彩色灰亮度当量DCAIx。对于sRGB颜色空间D65白场的颜色,103°黄色DCAIx最大为1,306°蓝色DCAIx最小为0.3331。像素颜色视觉感知亮度LAi,j大于LCmaxh1则计算调控亮度:LT2i,j=LTi,j+((LAi,j-LCmaxL1)/(100-LCmaxL1)×DCAIx)×KT2其中,KT2为设置的调控系数,数值1.0-2.0。(4-5-2)计算像素颜色视觉感知饱和度的彩色灰亮度当量DBAOx和调控后亮度LT3i,j,像素颜色视觉感知亮度LAi,j大于LCmaxh1则计算像素颜色视觉感知饱和度CAi,j的彩色灰亮度当量DBAOx:DBAOx=(CAi,j/CmaxL1)计算调整后亮度:LT3i,j=LT2i,j+((LAi,j-LCmaxL1)/(100-LCmaxL1)×DBAOx)×KT3其中,KT3为调控系数,数值范围0.0-3.0,典型1.0-2.0。在以上对颜色中性灰亮度增强的基础上,进一步将图像清晰度提升与颜色的彩色灰亮度值量化相关,进而加强了以图像中景物清晰度不同表现景物所处空间深度不同及增强景物立体感的效果。这也是本技术发明的特点之一。(5)将像素颜色的h、C和LT3i,j或LTi,j数值逆向变换为sRGB空间R、G和B数值。根据本发明的具体实施方式,将图像像素颜色饱和度C、色相h、和亮度LT3i,j或LTi,j数值计算为规范R、G和B值。根据本发明的优选技术方案,调用本发明的系统中的图像像素颜色模式逆向变换及规范化模块,计算包括:使用CIE推荐的标准方法,以图像像素颜色正向变换得到且未改变的的饱和度C、色相角h值以及经计算增强后得到的亮度LT3i,j或LTi,j数值计算为设备的红、绿和蓝三原色值。此算法为以上步骤(2)的逆运算,由像素颜色CIELAB参数计算CIEXYZ三刺激值所需白场CIEXYZ三刺激值与正向计算相同,由像素颜色CIEXYZ三刺激值计算RGB值所需3×3矩阵系数由以上步骤(2)所用矩阵3×3系数求逆获得:分别对计算得到的R、G和B值取整,并对大于255的数值规范化为255,对小于0的数值规范化为0。实施例2使用本发明的SECr算法的典型系统(1)使用SECr算法计算机程序的典型系统流程以计算机硬盘HD作为提交SECr算法的典型载体,同样功能的载体还包括CD、DVD、U盘等,以及经授权由网络调用SECr算法。SECr算法以程序方式由计算机CPU+GPU调用,在RAM中运行。彩色数字图像存储在计算机硬盘中由SECr算法程序调用,经SECr算法处理后再储存回硬盘中。图像数据可以拷贝在CD、DVD、U盘等载体和另外硬盘中,也可以通过网络传输至指定位置。SECr算法程序可以处理单帧图像和帧序列图像。单帧图像格式可是.tif、.bmp等未压缩格式,也可是.jpg等压缩格式。帧序列图像格式可是通用.MOV、.AVI等,也可使用专用I/O处理相关格式文件。实时观看SECr算法变换图像效果的显示器数量可以按需配置。系统如图8-1所示。(2)使用SECr算法IP的典型系统流程以电视机主芯片作为SECr算法IP的典型应用,IP中gamma校正模块使用的R、G和B各色阶查找表可根据电视机主芯片中特殊gamma设置进行调整。系统如图8-2所示。(3)使用SECr算法ASIC的电视机典型系统流程以电视机作为SECr算法ASIC的典型应用,设置与电视机匹配的I/O获取视频图像颜色RGB数据。系统如图8-3所示。(4)使用SECr算法ASIC的电子设备典型系统流程应用FECr算法ASIC的设备还包括笔记本电脑、平板电脑、手机、游戏机、LCD显示器、计算机显卡等,系统如图8-4所示。以上具体实施例仅用于说明本发明的技术方案而非限制,尽管参照上述实施例详细描述了本发明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或等同替换,都不脱离本发明的技术方案的实质和保护范围,其均应涵盖在本发明的权利要求范围内。

企业营业执照
专利注册证原件
身份证
个体户营业执照
身份证
专利注册证原件
专利代理委托书
转让申请书
转让协议
手续合格通知书
专利证书
专利利登记簿副本




提交

公众号
全国技术转移公共服务平台