
- 技术(专利)类型 发明专利
- 申请号/专利号 201910097301.3
- 技术(专利)名称 一种针对外科手术的机械抓手力反馈方法以及系统
- 项目单位
- 发明人 刘伟民
- 行业类别 人类生活必需品
- 技术成熟度 详情咨询
- 交易价格 ¥面议
- 联系人 任老师
- 发布时间 2021-01-26
 北京
北京
客服热线:010-83278899
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们
 北京
北京
客服热线:010-83278899
微信公众号 扫一扫 关注我们

项目简介
本发明提供了一种针对外科手术的机械抓手力反馈方法以及系统,包括:记录医生手术时指尖的压力信息、指节的力矩信息以及腕部的位置信息;整合压力信息以及力矩信息,按照时间线生成手术力度模型;整合位置信息,按照时间线生成手术动作轨迹模型;整合手术力度模型以及手术动作轨迹模型生成医生手术动作的用力体系模型;根据医生手术动作的用力体系模型指导相同类型手术操作过程,并以视觉图像、超声影像对手术动作的操作过程进行监督和修正。本发明实现手术过程中机械抓手的力反馈,此外还通过超声影像实现了视觉反馈,解决了现有技术中手术操作缺少力反馈的问题,实现通过力反馈指导手术操作,提高手术操作精度以及安全性。
说明书
技术领域
本发明涉及医疗器械技术领域,特别是一种针对外科手术的机械抓手力反馈方法以及系统。
背景技术
近年来,手术机器人系统逐渐应用于临床,它将传统医疗器械与信息技术、机器人技术相结合,使外科诊断与治疗达到了微创化、微型化、智能化。手术机器人与传统手术相比具有显著优势:首先机器人改善医生的工作模式,规范手术操作,提高手术质量,对外科手术发展与普及具有重要推动作用;另外,机器人没有人类的疲惫感和生理限制、不受外界刺激,工作幅度可以设计的很小,执行操作的精度高、操作灵活,延伸了医生手、眼的操作能力,消除了人手的固有颤抖,延长了外科医生的职业寿命。机器人本身不怕受射线辐射。这些优点使得机器人成为医生的最好助手。但手术机器人在实际应用中也有其缺点,其触觉力反馈的缺失对手术的影响非常大,包括手术器械的力反馈,例如特殊切割以及缝合需要依赖触觉力反馈时,造成手术精度低以及安全性低的问题,因此,急需一种针对外科手术的机械抓手力反馈方法,以实现手术时组织的力反馈以指导手术操作。
发明内容
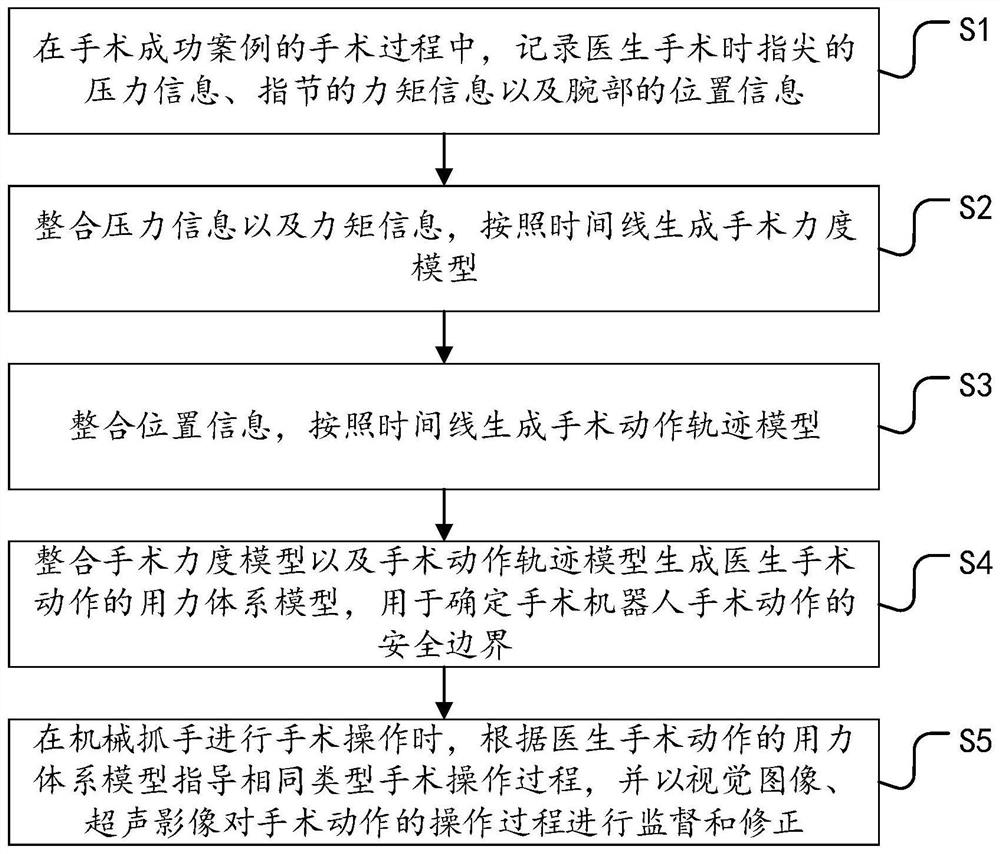
本发明的目的是提供一种针对外科手术的机械抓手力反馈方法以及系统,旨在解决现有技术中手术操作缺少力反馈的问题,实现通过力反馈指导手术操作,提高手术操作精度以及安全性。为达到上述技术目的,本发明提供了一种针对外科手术的机械抓手力反馈方法,所述方法包括以下步骤:S1、在手术成功案例的手术过程中,记录医生手术时指尖的压力信息、指节的力矩信息以及腕部的位置信息;S2、整合压力信息以及力矩信息,按照时间线生成手术力度模型;S3、整合位置信息,按照时间线生成手术动作轨迹模型;S4、整合手术力度模型以及手术动作轨迹模型生成医生手术动作的用力体系模型,用于确定手术机器人手术动作的安全边界;S5、在机械抓手进行手术操作时,根据医生手术动作的用力体系模型指导相同类型手术操作过程,并以视觉图像、超声影像对手术动作的操作过程进行监督和修正。优选地,所述压力信息通过压力传感器来获取;所述力矩信息通过力矩传感器来获取;所述位置信息通过位置传感器来获取。优选地,所述压力传感器设置于数据手套的第一关节指尖位置处;所述力矩传感器设置于第二、三关节处;所述位置传感器设置于腕部;所述数据手套佩戴于医生手臂。优选地,所述视觉图像通过机械臂上的视觉传感器拍摄手术创面影像来获取;所述超声影像通过超声传感器以及纳米探针传感器来获取,超声传感器发送并接收超声波,对手术创面下各种人体组织进行影像的获取,将获取到的手术创面下的人体组织的影像,以及皮下组织的生物结构进行显示,纳米探针感应器通过探针针头触及手术创面,分析手术创面生物组织结构,形成图像信息,提供给外科手术机器人的机械抓手的反馈信号,通过显示和数据的计算确定,动作力度体系的正确与否做出外科手术动作的修正和执行的持续。本发明还提供了一种针对外科手术的机械抓手力反馈系统,所述系统包括:机械抓手、成功案例收集模块、手术器械控制模块以及实时影像模块;所述机械抓手用于进行手术操作;所述成功案例收集模块用于收集医生手术时指尖的压力信息、指节的力矩信息以及腕部的位置信息,并生成手术力度模型以及手术动作轨迹模型,整合手术力度模型以及手术动作轨迹模型生成医生手术动作的用力体系模型;所述手术器械控制模块用于根据医生手术动作的用力体系模型指导机械抓手进行手术操作;所述实时影像模块用于通过视觉图像以及超声影像对手术操作过程进行修正。优选地,所述成功案例收集模块包括数据手套、压力传感器、力矩传感器以及位置传感器,所述压力传感器设置于数据手套的第一关节指尖位置处,采集指尖的压力信息;所述力矩传感器设置于第二、三关节处,采集手指的力矩信息,即动作角度信息;所述位置传感器设置于腕部,收集腕部的位置信息;所述数据手套佩戴于医生手臂。优选地,所述手术器械控制模块包括压力传感器、力矩传感器、磁性位置传感器,所述压力传感器设置于机械抓手的五个手指的每个第一关节指尖;所述力矩传感器设置于机械抓手手指的第二、三关节;所述磁性位置传感器设置于机械抓手的腕关节处。优选地,所述实时影像模块包括视觉传感器、超声传感器、纳米探针传感器以及显示单元,所述视觉传感器设置于机械臂上,对手术创面进行拍照,获取视觉图像;所述超声传感器设置于机械抓手前端,通过发送并接收超声波,对当前手术的表面组织以及创面下的人体组织进行超声影像的获取,将获取到的超声影像发送至显示单元;所述纳米探针传感器通过探针针头触及手术创面,分析手术创面生物组织结构,形成图像信息,发送至显示单元。发明内容中提供的效果仅仅是实施例的效果,而不是发明所有的全部效果,上述技术方案中的一个技术方案具有如下优点或有益效果:与现有技术相比,本发明通过记录医生手术时指尖的压力信息、指节的力矩信息以及腕部的位置信息,并整合压力信息以及力矩信息,按照时间线生成手术力度模型,整合位置信息,按照时间线生成手术动作轨迹模型,结合手术力度模型以及手术动作轨迹模型指导相同类型手术操作过程,实现手术过程中机械抓手的力反馈,此外还通过视觉图像、超声影像和纳米探针实现了视觉及触觉反馈。本发明解决了现有技术中手术操作缺少力反馈的问题,实现通过力反馈指导手术操作,提高手术操作精度以及安全性。
附图说明
图1为本发明实施例中所提供的一种针对外科手术的机械抓手力反馈方法流程图;图2为本发明实施例中所提供的一种针对外科手术的机械抓手力反馈系统结构框图。
具体实施方式
为了能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图,对本发明进行详细阐述。下文的公开提供了许多不同的实施例或例子用来实现本发明的不同结构。为了简化本发明的公开,下文中对特定例子的部件和设置进行描述。此外,本发明可以在不同例子中重复参考数字和/或字母。这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施例和/或设置之间的关系。应当注意,在附图中所图示的部件不一定按比例绘制。本发明省略了对公知组件和处理技术及工艺的描述以避免不必要地限制本发明。下面结合附图对本发明实施例所提供的一种针对外科手术的机械抓手力反馈方法以及系统进行详细说明。如图1所示,本发明实施例公开了一种针对外科手术的机械抓手力反馈方法,所述方法包括以下步骤:S1、在手术成功案例的手术过程中,记录医生手术时指尖的压力信息、指节的力矩信息以及腕部的位置信息;S2、整合压力信息以及力矩信息,按照时间线生成手术力度模型;S3、整合位置信息,按照时间线生成手术动作轨迹模型;S4、整合手术力度模型以及手术动作轨迹模型生成医生手术动作的用力体系模型,用于确定手术机器人手术动作的安全边界;S5、在机械抓手进行手术操作时,根据医生手术动作的用力体系模型指导相同类型手术操作过程,并以视觉图像、超声影像对手术动作的操作过程进行监督和修正。在机械臂上设置力反馈监督系统,包括机械抓手、实时影像模块、手术器械控制模块以及成功案例收集模块。通过成功案例收集模块收集手术成功案例的中的各项力学参数,包括机械抓手指尖的压力信息、指节的力矩信息以及腕部的位置信息。设置数据手套、压力传感器、力矩传感器以及位置传感器,所述压力传感器设置于数据手套的第一关节指尖位置处,采集指尖的压力信息;所述力矩传感器设置于第二、三关节处,采集手指的力矩信息,即动作角度信息;所述位置传感器设置于腕部,收集腕部的位置信息。手术医师佩戴数据手套后,在完成手术过程中,将医师手术动作时,手指和手腕的动作角度、运行轨迹以及压力大小记录下来,按照时间线形成手术动作轨迹模型以及手术力度模型,两者结合,作为手术机器人的手术动作标准,所述手术动作包括切、割、剥离、缝合等操作,该动作标准可为相同类型的手术提供参考借鉴,或者通过输入参数,指导手术机器人自动化完成手术操作。在利用机械抓手进行手术动作时,通过手术器械控制模块来对机械抓手的参数实时获取并控制机械抓手的动作。将压力传感器设置于机械抓手的五个手指的每个第一关节内侧,通过压力传感器返回的压力信息,确定手术机械抓手的捏力松紧度;将力矩传感器设置于手指的第二、三关节,通过力矩传感器传回的力矩信息,确定机械抓手的手指用力角度;将位置传感器设置于机械抓手的腕关节处,所述位置传感器为对称设置,通过各个位置传感器传回的位置信息,实现机械抓手可多角度多方向满足手术动作的精确到位。通过实时获取各传感器的参数,并通过成功案例收集模块记录的手术动作轨迹模型以及手术力度模型对机械抓手进行动作控制。由于手术对象的个体差异,在利用成功案例中的手术动作轨迹模型以及手术力度模型进行手术时,不可避免的会遇到与成功案例不同的处理结果,因此结合视觉图像以及超声影像对手术过程进行修正。所述视觉图像通过机械臂上的视觉传感器拍摄手术创面影像来获取;所述超声影像通过超声传感器以及纳米探针传感器来获取,超声传感器发送并接收超声波,对手术创面下各种人体组织进行影像的获取,将获取到的手术创面下的人体组织的影像,以及皮下组织的生物结构进行显示,纳米探针感应器通过探针针头触及手术创面,分析手术创面生物组织结构,形成图像信息,提供给外科手术机器人的机械抓手的反馈信号,通过显示和数据的计算确定,动作力度体系的正确与否做出外科手术动作的修正和执行的持续。本发明实施例通过记录医生手术时指尖的压力信息、指节的力矩信息以及腕部的位置信息,并整合压力信息以及力矩信息,按照时间线生成手术力度模型,整合位置信息,按照时间线生成手术动作轨迹模型,结合手术力度模型以及手术动作轨迹模型指导相同类型手术操作过程,实现手术过程中机械抓手的力反馈。解决了现有技术中手术操作缺少力反馈的问题,实现通过力反馈指导手术操作,提高手术操作精度以及安全性。如图2所示,本发明实施例还公开了一种针对外科手术的机械抓手力反馈系统,所述系统包括:机械抓手、成功案例收集模块、手术器械控制模块以及实时影像模块;所述机械抓手用于进行手术操作;所述成功案例收集模块用于收集医生手术时指尖的压力信息、指节的力矩信息以及腕部的位置信息,并生成手术力度模型以及手术动作轨迹模型,整合手术力度模型以及手术动作轨迹模型生成医生手术动作的用力体系模型;所述手术器械控制模块用于根据医生手术动作的用力体系模型指导机械抓手进行手术操作;所述实时影像模块用于通过视觉图像以及超声影像对手术操作过程进行修正。在机械臂上设置力反馈监督系统,包括机械抓手、实时影像模块、手术器械控制模块以及成功案例收集模块。所述成功案例收集模块包括数据手套、压力传感器、力矩传感器以及位置传感器,所述压力传感器设置于数据手套的第一关节指尖位置处,采集指尖的压力信息;所述力矩传感器设置于第二、三关节处,采集手指的力矩信息,即动作角度信息;所述位置传感器设置于腕部,收集腕部的位置信息。手术医师佩戴数据手套后,在完成手术过程中,将医师手术动作时,手指和手腕的动作角度、运行轨迹以及压力大小记录下来,形成手术动作轨迹模型以及力度模型,两者结合,作为手术机器人的手术动作标准,所述手术动作包括切、割、剥离、缝合等操作,该动作标准可为相同类型的手术提供参考借鉴,或者通过输入参数,指导手术机器人自动化完成手术操作。所述手术器械控制模块包括压力传感器、力矩传感器、磁性位置传感器,所述压力传感器设置于机械抓手的五个手指的每个第一关节指尖,通过压力传感器返回的压力信息,确定手术机械抓手的捏力松紧度;所述力矩传感器设置于手指的第二、三关节,通过力矩传感器传回的力矩信息,确定机械抓手的手指用力角度;所述磁性位置传感器设置于机械抓手的腕关节处,所述磁性位置传感器为对称设置,通过各个位置传感器传回的位置信息,实现机械抓手可多角度多方向满足手术动作的精确到位。通过各种类型的传感器感知当前手术动作,从而实现机械抓手可以像人手一样,抓取医疗器械,确保医疗器械在手术治疗过程中平稳可靠,顺利完成治疗任务。所述实时影像模块包括视觉传感器、超声传感器、纳米探针传感器以及显示单元,所述视觉传感器设置于机械臂上,对手术创面进行拍照,获取视觉图像;所述超声传感器设置于机械抓手前端,通过发送并接收超声波,对当前手术的表面组织以及创面下的人体组织进行超声影像的获取,将获取到的超声影像发送至显示单元;所述纳米探针传感器通过探针针头触及手术创面,分析手术创面生物组织结构,形成图像信息,发送至显示单元,手术操作医师可从显示单元实时掌握手术器械的工作进展情况。以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。

企业营业执照
专利注册证原件
身份证
个体户营业执照
身份证
专利注册证原件
专利代理委托书
转让申请书
转让协议
手续合格通知书
专利证书
专利利登记簿副本




提交

公众号
全国技术转移公共服务平台