
一种用于曳引式电梯平衡系数的新型测量装置
其测量原理是:通过测量曳引绳的曳引绳张力,实现电梯平衡系数的测量。
这种新型测量装置区别于传统测量装置的最显著的特点是:无需在电梯轿厢内放置载荷,直接夹紧曳引机两侧的曳引绳即可实现平衡系数的测量。
这种新型测量装置克服了现有的电梯平衡系数测量装置的各种缺点,如:劳动强度大、工作效率低、操作不方便、不易测量低层站电梯的平衡系数……。
这种新型测量装置的优点主要有:外形小巧美观、携带方便、操作简单、劳动强度低、工作效率高、测量精度高、可测量低层站电梯等。
 北京
北京
客服热线:010-83278899
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们


项目简介
一种用于曳引式电梯平衡系数的新型测量装置
其测量原理是:通过测量曳引绳的曳引绳张力,实现电梯平衡系数的测量。
这种新型测量装置区别于传统测量装置的最显著的特点是:无需在电梯轿厢内放置载荷,直接夹紧曳引机两侧的曳引绳即可实现平衡系数的测量。
这种新型测量装置克服了现有的电梯平衡系数测量装置的各种缺点,如:劳动强度大、工作效率低、操作不方便、不易测量低层站电梯的平衡系数……。
这种新型测量装置的优点主要有:外形小巧美观、携带方便、操作简单、劳动强度低、工作效率高、测量精度高、可测量低层站电梯等。

1、本专利技术所属的技术领域:
本发明属于电梯和检测技术领域。
2、相关背景:
平衡系数是曳引式电梯的重要参数。适当重量的对重可以部分地平衡轿厢及
轿内载荷的重量,减少电梯的使用能耗。
平衡系数=(对重重量-空载轿厢的重量)/电梯的额定载重量。
对于新安装的、在用的电梯,必须对平衡系数进行测试。
TSGT7001-2009《电梯监督检验和定期检验规则-曳引与强制驱动电梯》规定:
曳引电梯的平衡系数应当在0.40~0.50之间,或者符合制造(改造)单位的设
计值,规定的测试方法是:轿厢分别装载额定载重量的30%、40%、45%、50%、
60%作上、下全程运行,当轿厢和对重运行到同一水平位置时,记录电动机的电
流值,绘制电流-负荷曲线以上、下行运行曲线的交点确定平衡系数。
目前,电梯平衡系数的测试方法主要有:
――带载电流法:这是当前使用最普遍的测试方法。在电梯轿厢内依次放置
不同重量的载荷作上、下全程运行。在控制柜处分别测量不同载荷时、轿厢位于
井道中间位置的电动机电流,绘制电流-负载曲线图,由电流-负载曲线的相交点
确定电梯的平衡系数。这种方法的优点是:方法简单且成熟;缺点是:需要大量
的人力往轿厢内搬运砝码,工作效率低、劳动强度大,不易测量低层站电梯的平
衡系数。
――空载电流法:这是当前正在推广的测试方法。空载电流法检测电梯轿厢
和对重在相同位置、匀速运行时的电梯上行功率和速度以及电梯的下行功率及速
度,计算出电梯的平衡系数。这种方法的优点是:无需在轿厢安放置载荷、操作
简单;缺点是:当前以这种方法的测量原理的正确性存疑,不易测量低层站电梯
的平衡系数。
――间接称重法:这种方法要求将对重蹲坐在缓冲器上后,将电梯制动器打
开。测量此时对重施加在缓冲器上的重量,即获得对重重量与轿厢重量之间的重
量差,从而计算出平衡系数。这种测量方法的优点是测量结果准确,缺点是操作
不便。
――直接称重法:这种方法要求直接称量电梯轿厢的重量和对重重重量。这
种测量方法的缺点是:很难实现对电梯轿厢的直接称重。
――松闸盘车法:在轿厢内放置相当于额定载重40%-50%的重物,半轿厢与对
重运行到井道中间位置,操作人员在机房松闸,观察曳引机的溜车方向,必要时
配合以人工盘车动作,借此判断电梯平衡系数。
3、本专利的具体方案
本专利方案提出了一种专门用于曳引式电梯平衡系数测量的装置和方法。
适用于常见的电梯曳引绳:曳引钢丝绳、曳引钢带。
适用于各种电梯悬挂比(或称缠绕比),如1:1、2:1、3:1、4:1。
2
(1)测量原理
本方法通过分别对电梯的空载轿厢与对重侧的曳引绳的张力的测量(对于实
际被测的电梯,为测量一组曳引绳的共同张力),推算出空载轿厢与对重侧的重量,
并进一步推算出电梯的平衡系数。
对曳引绳张力的测量原理如图1,对于静止状态、轿厢与对重均悬空的电梯,
在电梯曳引绳的同一侧布置两个支承点的t1、t3,支承点t1、t3限制电梯曳引
绳向一侧作横向移动,在曳引绳轴线方向上与曳引绳为滑动接触(无滑动阻力,
曳引绳可沿t1-t3方向无阻力地滑动)。
在支承点t1、t3连线的中间位置t2处向电梯曳引绳施加一个大小为F、指
向支承点t1、t3一侧、与曳引绳垂直的横向推力使曳引绳产生位移。

图1对曳引绳张力的测量原理图
记曳引绳的张力为T,则曳引绳的位移与曳引绳的张力T、曳引绳偏离轴线的
3
角度为α,则曳引绳在t2处的反作用力为F。有:

曳引机两侧对曳引绳分别施加同样的力F,让曳引绳产生位移(两侧支承点
为滚筒支承结构)。如图2

记电梯的额定载重量为G0,轿厢重量为G1,对重重量为G2,记轿厢侧、对重侧
曳引绳的张力分别为T1、T2,悬挂比为i,在轿厢侧、对重侧曳引绳上测得的反作用
力分别为F1、F2,由F1、F2推算得到的轿厢重量与对重重量分别为G(1)、G(2)。

参见图1、图3,当电梯悬挂比为1:1时,曳引机两侧的曳引绳,曳引绳的
张力分别等于轿厢的重量或对重的重量。




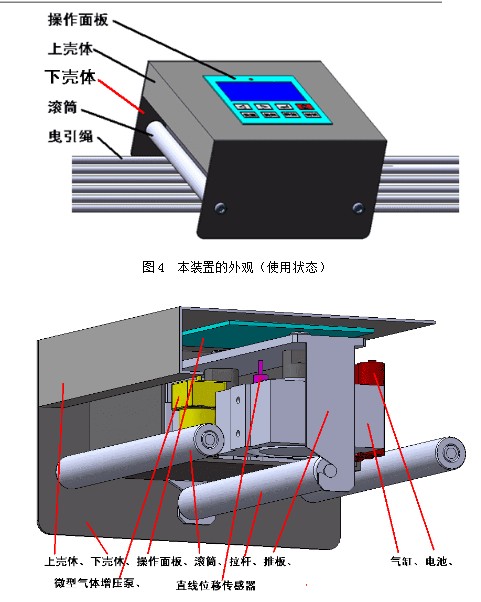
图5本装置内部的部分主要部件
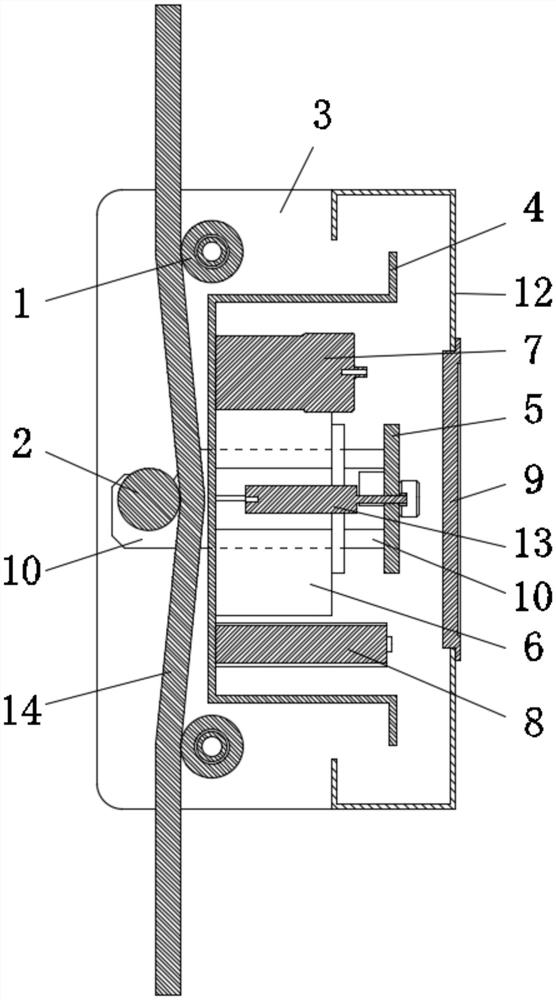
如图4、图5,本装置的底部有两根滚筒。两根滚筒相互平行、外壳与轴之间
安装有轴承,滚筒外壳可以绕中心轴自由转动,因此在测试时不会阻碍曳引绳沿
其轴线方向自由移动,有利于提高本装置的测量精度。
在两根滚筒的中间位置布置一根拉杆,拉杆与两根滚筒平行。拉杆在气缸的
推动下沿垂直于拉杆、滚筒、曳引绳的方向上下移动。通过测量拉杆的位移量和
拉力(对于实际的电梯,此拉力等于一组曳引绳的共同反作用力),从而测得电梯
的平衡系数。为了提高实际使用时的拆装效率并保证拉杆与推板之间的较小安装
间隙和牢固连接,在推板上采用了有倾斜开口的固定孔的快速拆装设计。
如图6,本装置的电气控制系统由操作面板、电磁阀、电池、直线位移传感器、
压力传感器、电路板等组成。在电路主板上布置有MCU芯片、AD芯片、其它电子
元器件。采用MCU芯片为核心构建控制电路。MCU芯片运行控制程序与数据处理
程序,接受操作人员输入的各种设定值、接受压力传感器、直线位移传感器提供
的测量数据,控制微型气体增压泵电机的启停和电磁阀的开闭。采用压力传感器
监测气缸内的工作气体压力,压力传感器的输出模拟信号经AD转换为数据信号后,
提供给MCU芯片进行进一步的运算与处理。采用直线位移传感器监测气缸柱塞的
移动,直线位移传感器的输出模拟信号经AD转换后,提供给MCU芯片进行进一步
的运算与处理。


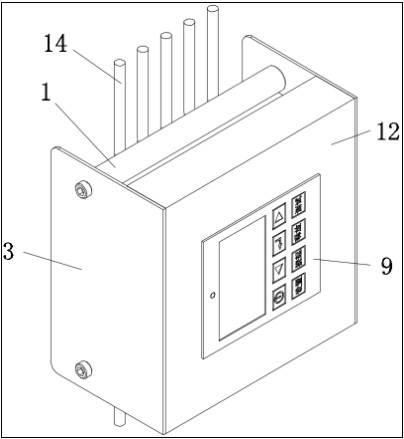
(3)操作面板的布置与使用方法
如图9所示,本装置的操作面板上设有显示屏,用于显示状态、设定值和测
试结果。

操作面板上设有电池指示灯,用于开机后指示内部电池的状态。
操作面板上还布置有以下操作按键:
①“电源开关”键:用于打开或关闭本装置的电源。
②“设置”按键
用于设置本装置的以下测量参数:
――电梯的额定载重量,宜设有默认值,如1000kg;
――悬挂比,宜设有默认值,如1:1或2:1;
――位移值,具有多个可选值,宜设有默认值。
――测试分组数。宜设有默认值,如1。
③“选择”按键
共有2只“选择”按键。用于设定电梯的额定载重量、悬挂比、位移值、测
试分组数。
③“确认”键
用于设置参数、确认测试数据。设定数值或完成曳引机一侧的测试后,按下
“确认”键后本装置记忆当前的设置数据或测试数据。
④“测试”键:按“测试”键后,本装置在MCU芯片的控制下,先执行寻找
零点程序,再执行拉紧测试程序。
10
――执行寻找零点程序:MCU启动增压泵让拉杆收紧,当气缸内的压力明显
升高时,再关闭增压泵并打开电磁阀,使气缸柱塞放松,使拉杆完全接触曳引绳
但无明显的压力,MCU设定此点位置为测试的位移零点。
――拉紧测试程序:完成寻找零点程序后,MCU芯片启动增压泵,气缸柱塞
推动拉杆,使曳引绳的横向位移达到并保持在设定的位移值处,关闭增压泵并测
量气缸内的压力,从而计算得曳引绳组的张力,并进一步算出并显示测试结果。
当测试分组数为1时,本装置获得了第2个测试结果时,显示测得的平衡系
数。当测试分组数多于1时,装置获得了每组的测试数据后,显示测得的平衡系
数。
⑥“提起”键:手动控制增压泵工作,使气缸柱塞伸出,带动拉杆提起。
⑦“释放”键:手动控制电磁阀开启,可让气缸柱塞回缩回,将拉杆释放。
(4)使用方法
①启动
测试人员按“电源开关”键,打开本装置。
②设置
测试人员利用“选择”与“确认”键设置额定载重量、悬挂比、位移值、测
试分组数。
可以在启动后、在曳引绳上安装本装置之前或之后时进行本项设置。
③在曳引机两侧的曳引绳上安装本装置
应将本装置先后安装在曳引机两侧的曳引绳上进行测量,在轿厢侧、对重侧
的测量顺序不分先后。
将本装置安装在曳引机一侧的曳引绳上,装上拉杆,此时可以按下“提起”
键以让拉杆拉紧曳引绳,以固定本装置。也可以不按“提起”键,直接按“测试”
键,本装置会自动地固定在曳引绳上。
安装本装置时,应注意滚筒轴线与曳引绳基本保持垂直,曳引绳组宜位于滚
筒与拉杆的中部。
④测试
按“测试”键,MCU芯片控制微型气体增压泵工作,MCU芯片先执行寻找零点
程序,再执行拉紧测试程序。当MCU芯片判断拉杆达到并保持在设定的位移处时,
MCU芯片判断气缸内的压力值,计算并显示当前的测试数据。
测试时应注意滚筒轴线与曳引绳是否基本保持互相垂直,曳引绳是否与本装
置的下壳体无磨擦。
当测试分组数为1时,本装置获得了第2个测试结果时,计算并显示测得的
平衡系数。当测试分组数多于1时,本装置获得了规定组数的测试数据后,才能
计算并显示测出的平衡系数。
11
⑤拆除本装置,关机
按下“释放”键,电磁阀开启,气缸内气体泄出,拉杆被松开,操作人员取
出拉杆,将本装置从曳引绳上取下。
测试人员操纵电源开关,关闭本装置。
4、本专利取得的有益成果
本专利实现了一种测量电梯平衡系数的方法和专用装置,具有操作简单、结
果准确、工作效率高的优点。
克服了现有电梯平衡系数测量技术中操作不便、工作效率低、劳动强度大不
易测量低层站电梯的缺点。
5、本专利的替代方案
可以采用电机或手动、液压动力等,带动螺杆、杠杆、斜面、凸轮、液压缸
等机构,代替本方案中的气动驱动结构,拉动曳引绳产生一定的横向位移,从曳
引绳的反作用力推算出曳引绳的张力,并进一步算出空载轿厢的重量与对重的重
理,从而测得电梯的平衡系数。
说明书
技术领域
本实用新型涉及电梯检测技术领域,特别是涉及一种电梯平衡系数的测量装置。
背景技术
平衡系数是曳引式电梯的重要参数。适当重量的对重可以部分地平衡轿厢及轿内载荷的重量,减少电梯的使用能耗。平衡系数=(对重重量-空载轿厢的重量)/电梯的额定载重量。对于新安装的、在用的电梯,必须对平衡系数进行测试。TSG T7001-2009《电梯监督检验和定期检验规则-曳引与强制驱动电梯》规定:曳引电梯的平衡系数应当在0.40-0.50之间,或者符合制造(改造)单位的设计值,规定的测试方法是:轿厢分别装载额定载重量的30%、40%、45%、50%、60%作上、下全程运行,当轿厢和对重运行到同一水平位置时,记录电动机的电流值,绘制电流-负荷曲线以上、下行运行曲线的交点确定平衡系数。目前,电梯平衡系数的测试方法主要有:带载电流法:这是当前使用最普遍的测试方法。在电梯轿厢内依次放置不同重量的载荷作上、下全程运行。在控制柜处分别测量不同载荷时、轿厢位于井道中间位置的电动机电流,绘制电流-负载曲线图,由电流-负载曲线的相交点确定电梯的平衡系数。这种方法的优点是:方法简单且成熟;缺点是:需要大量的人力往轿厢内搬运砝码,工作效率低、劳动强度大,不易测量低层站电梯的平衡系数。空载电流法:这是当前正在普及的测试方法。空载电流法检测电梯轿厢和对重在相同位置、匀速运行时的电梯上行功率和速度以及电梯的下行功率及速度,计算出电梯的平衡系数。这种方法的优点是:无需在轿厢内放置载荷、操作简单;缺点是:已有人对这种方法的测量原理的正确性提出怀疑,并且不易测量低层站电梯的平衡系数。间接称重法:这种方法要求将对重蹲坐在缓冲器上后,将电梯制动器打开。测量此时对重施加在缓冲器上的重量,即获得对重重量与轿厢重量之间的重量差,从而计算出平衡系数。这种测量方法的优点是操作简单、测量准确,缺点是操作不太方便。直接称重法:这种方法要求直接称量电梯轿厢的重量和对重重量。这种测量方法的缺点是:很难实现对电梯轿厢和电梯对重的直接称重。松闸盘车法:在轿厢内先后放置相当于额定载重40%-50%的重物,将轿厢与对重运行到井道中间、高度相同的位置,操作人员在机房松闸,观察曳引机的溜车方向,必要时配合以人工盘车动作,借此判断电梯平衡系数。这种测量方法的优点是不需要专门的测量装置,缺点是测量结果不准确。实用新型内容为解决上述技术问题,本实用新型提供了一种电梯平衡系数的测量装置,测量装置简单,操作方便,工作效率高,适用于绝大多数的电梯,测量结果准确。本实用新型解决其技术问题所采用的技术方案是:一种电梯平衡系数的测量装置,包括以下机构:第一机构,用于使曳引绳的测试点沿与曳引绳轴向垂直的方向产生位移;第二机构,作用于第一机构,用于为第一机构提供使曳引绳的测试点产生位移的驱动力;第三机构,用于测量曳引绳的测试点的位移值;第四机构,用于测量使曳引绳的测试点位移的驱动力。进一步的,所述第一机构包括以下机构:两个平行的支承杆、与支承杆平行的测量杆;两个支承杆,分别放置在曳引绳待测量位置相同的一侧的上方和下方;测量杆,位于两个支承杆之间的中间区域并放置在曳引绳且与支承杆相反的一侧,两个支承杆与测量杆平行并且相对于测量杆对称;所述测量杆用于沿着与曳引绳轴向垂直且与测量杆垂直的方向移动来配合支承杆接触曳引绳并使测量杆继续移动设定的距离,使曳引绳的测试点产生位移,或者配合支承杆松开曳引绳;所述第二机构为位移驱动机构,用于为测量杆提供驱动力;所述第三机构为测位移装置,用于通过测量测量杆的位移值来配合使测量杆推动曳引绳的测试点按照设定的位移值移动;所述第四机构为测驱动力装置,用于测量位移驱动机构提供给测量杆的驱动力值。进一步的,测量装置还包括外壳;所述外壳包括两个侧板;所述支承杆安装在两个侧板之间。进一步的,所述支承杆为滚筒结构;滚筒结构具有安装在两个侧板上的轴和套在轴上的滚筒;所述滚筒与轴之间安装有轴承,使滚筒可绕轴自由转动。进一步的,测量装置还包括内支撑板和移动架;所述移动架具有移动板和移动导向板;所述内支撑板上开设有导向孔;所述移动导向板穿过导向孔后与测量杆连接,用于移动板通过移动导向板沿导向孔移动,进而带动测量杆移动,并进一步带动曳引绳的测试点移动。进一步的,所述移动架与测量杆连接的一端设置有钩部;所述钩部的内侧形成向上倾斜开口的钩槽,所述测量杆的端部卡在钩槽中,用于使测量杆可快速拆装。进一步的,所述位移驱动机构包括驱动元件,所述驱动元件安装在内支撑板和移动板之间,用于驱动移动板移动。进一步的,所述驱动元件为一个或多个驱动气缸;当驱动元件为多个驱动气缸时,多个驱动气缸对称分布并同步动作。进一步的,所述位移驱动机构还包括增压泵,用于为驱动气缸提供压缩空气。进一步的,所述位移驱动机构还包括单向阀、溢流阀;所述增压泵的出气端通过气路连接单向阀的输入端,单向阀的输出端连接进气主路,进气主路的末端通过进气分路分别与驱动气缸的进气口连接;所述溢流阀连接在进气主路上。进一步的,所述测位移装置为直线位移传感器;直线位移传感器安装在内支撑板和移动板中的任意一个板上,直线位移传感器的另一端正对着另一个板,用于测量移动板相对于内支撑板的移动距离,进而实现曳引绳测试点位移值的测量。进一步的,所述测驱动力装置为压力传感器,用于监测驱动气缸内的工作气体的压力,来表征测量杆的驱动力;所述压力传感器的测试端连接在进气主路上。进一步的,所述外壳还包括前板;所述前板上安装有控制面板;所述控制面板内设置有电路主板;所述电路主板上至少设置有MCU芯片、AD芯片;所述AD芯片用于采集直线位移传感器和压力传感器的模拟信号并转换为数字信号后传输给MCU芯片;所述MCU芯片被配置为:接收输入的参数数据,接收AD芯片的测量模拟数据,接收输入的指令,向位移驱动机构输出控制信号,对接收的数据进行运算与处理。进一步的,所述控制面板设置有显示屏和操作按键;所述操作按键用于输入参数数据和输入指令。进一步的,所述位移驱动机构还包括电磁阀,所述电磁阀通过排气气路连接在进气主路上;电磁阀与MCU芯片电连接;电磁阀、增压泵、MCU芯片、直线位移传感器、驱动气缸实现对测量杆移动的闭环控制。进一步的,测量装置还包括电源,用于各用电部件供电。本实用新型的优点:本实用新型的一种电梯平衡系数的测量装置,测量装置简单,操作方便;通过使曳引绳的测试点在沿其轴向垂直方向产生位移的方式,使测试点的位移量等于设定值;使靠近测试点两侧的曳引绳段偏离特定的角度,测量使测试点产生设定的位移量所需要的驱动力,即可精确的计算出电梯平衡系数;采用的两个支承杆和一个移动的测量杆的设计,使参数s为定值,而测量杆的位移值为可由操作人员设定,大幅减少了电梯平衡系数计算时的变量,仅需测量测量杆达到设定位移值并保持在此位置时所需要的驱动力即可;通过钩部的设计,使测量杆可快速的拆装,方便操作人员的操作;对测量杆移动距离的闭环控制,使测量杆精确地使曳引绳的测试点按照设定的位移值移动,提高了测量的准确度。
附图说明
图1为实施例的一种电梯平衡系数的测量装置的立体示意图;图2为实施例的一种电梯平衡系数的测量装置的主视示意图;图3为图2的A-A的剖面示意图;图4为图2的B-B的剖面示意图;图5为实施例的一种电梯平衡系数的测量装置去除左侧板的左视示意图;图6为实施例的一种电梯平衡系数的测量装置的气动系统的示意图;图7为实施例的一种电梯平衡系数的测量装置的控制系统的示意图;图8为实施例的一种电梯平衡系数的测量装置的测试原理的示意图;图9为实施例的一种电梯平衡系数的测量装置用于不同悬挂比的电梯的曳引绳时的测试位置的示意图;图10为实施例的一种电梯平衡系数的测量装置对曳引绳进行分组测试的示意图。
具体实施方式
为了加深对本实用新型的理解,下面将结合附图和实施例对本实用新型做进一步详细描述,该实施例仅用于解释本实用新型,并不对本实用新型的保护范围构成限定。实施例本实施例以图2的视角来进行上、下、左、右、前、后的描述;需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于图2所示的方位或位置关系,仅是为了便于描述本实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作。如图1至图5所示,本实施例提供了一种电梯平衡系数的测量装置,由前板12、侧板3、内支撑板4、移动架构成,还包括支承杆1、测量杆2、驱动气缸6、直线位移传感器13、压力传感器15;移动架包括移动板5、和固定在移动板5左右两端的移动导向板10;其中,侧板3固定在前板12的左右两侧;内支撑板4呈几字型,开口朝前的固定在两个侧板3之间位于前板12后方的位置,内支撑板4具有一安装后板,安装后板的左右两端位于上下方向的中间位置开设有用于移动导向板向后穿设的导向孔;所述移动架的移动板5位于内支撑板4的安装后板的前方,两个移动导向板10对应的穿过安装后板上的导向孔,测量杆2安装在两个移动导向板10的后端之间;两个侧板3之间在靠上的位置和靠下的位置分别安装支承杆1;直线位移传感器13安装在移动板5的后侧,通过螺栓锁紧固定,直线位移传感器13的壳体被固定安装在安装后板上,测量伸缩杆安装在移动板5上(也可反着安装),用于测量移动板5相对于内支撑板4的安装后板的移动距离,进而实现对测量杆移动距离和曳引绳测试点移动距离的测量;驱动气缸6安装在内支撑板4的安装后板与移动板5之间;驱动气缸6安装在安装后板上,其活塞的前端通过螺栓与移动板5固定;压力传感器用于监测驱动气缸内的工作气体的压力,来表征作用在测量杆的驱动力。本实施例的一种电梯平衡系数的测量装置中,在导向孔的作用下,测量杆2可被移动架带动前后移动,而两个平行的支承杆1所在的面与测量杆2的移动方向垂直;支承杆用于支撑曳引绳以保证在曳引绳的测试点两侧一定范围以外的曳引绳不会被测量杆沿垂直于曳引绳轴向的方向推动。本实施例的一种电梯平衡系数的测量装置中,驱动气缸6的数量为两个,呈左右对称分布,工作时能同步动作,提供相同的驱动力,使测量杆2获得较大的驱动力,克服曳引绳14张紧状态不均匀而造成的不利影响,保证测量杆2均匀、平缓地拉动曳引绳14,提高本装置工作的可靠性和测量精度。本实施例的一种电梯平衡系数的测量装置中,移动导向板10的后端设置有钩部11;所述钩部11的顶侧形成向上向前倾斜开口的钩槽,所述测量杆2的端部卡在钩槽中,提高实际使用时,测量杆的拆装效率并保证测量杆与移动导向板之间的较小安装间隙和牢固连接。本实施例的一种电梯平衡系数的测量装置中,所述支承杆1为滚筒结构;滚筒结构具有安装在两个侧板3上的轴和套在轴上的滚筒;所述滚筒与轴之间安装有轴承,使滚筒可绕轴自由转动;此种设置,在测试时,不会阻碍曳引绳沿其轴线方向自由移动,有利于提高本装置的测量精度。再如图6所示,本实施例的一种电梯平衡系数的测量装置中,还设置有用于为驱动气缸提供气源的气动系统,供气系统包括增压泵7、单向阀19、电磁阀17、溢流阀18;所述增压泵7安装在内支撑板4的安装后板上;增压泵7的出气端通过气路连接单向阀19的输入端,单向阀19的输出端连接进气主路,进气主路的末端通过进气分路分别与对应的驱动气缸的进气口连接;溢流阀18能通过溢流气路连接在进气主路上;电磁阀通过排气气路连接在进气主路上。再如图7所示,本实施例的一种电梯平衡系数的测量装置中,还设置有控制系统;所述前板12上安装有控制面板9;控制面板9内设置有电路主板;所述电路主板上至少设置有MCU芯片16、AD芯片20;控制面板9上还设置有显示屏21和操作按键22;其中,AD芯片20分别与直线位移传感器13和压力传感器15以及MCU芯片电连接,用于采集直线位移传感器13和压力传感器15的模拟信号并转换为数字信号后传输给MCU芯片16;MCU芯片16分别与增压泵7的电机、电磁阀17、显示屏22电连接,MCU芯片16被配置为接收手动输入的参数数据,接收AD芯片20的数据,接收手动输入的指令,向增压泵的电机和电磁阀17输出控制信号,向显示屏22输出显示信号,对接收的数据进行运算与处理;显示屏用于显示状态、设定参数和测试结果。本实施例的一种电梯平衡系数的测量装置中,采用MCU芯片作为核心构建控制电路;MCU芯片运行控制程序与数据处理程序,接受操作人员输入的各种设定值、接受压力传感器、直线位移传感器提供的测量数据,控制增压泵电机的启停和电磁阀的开闭;当测量杆按照设定的位移值移动时,当驱动气缸的活塞驱动移动架带动测量杆移动距离不等于设定值时(直线位移传感器实时反馈所移动的距离),MCU芯片控制增压泵电机的启停和电磁阀关启,使测量杆的位移量等于设定值;电磁阀17、增压泵7、MCU芯片16、直线位移传感器13、压力传感器15、驱动气缸6实现对测量杆移动的闭环控制,使测量杆精确按照设定的位移值进行移动。再如图2所示,依然按照图2所示的方向来进行描述,本实施例的一种电梯平衡系数的测量装置中,操作按键22有八个,分别为“电源开关”按键、两只选择按键、一只确认按键、“设置”按键、“提起”按键、“释放”按键、“测试”按键;其中,“电源开关”按键,被配置为打开或关闭本装置的电源;“设置”按键、两只选择按键、一只确认按键组合使用,并被配置为设置以下参数:a、电梯的额定载重量,b、悬挂比(例如1∶1、2∶1、3∶1、4∶1等),c、位移值(具有多个可选值),d、测试分组数(默认为1);确认按键还被配置为确认测试数据(完成一次测试后按下确认按键保存当前的测试数据);“测试”按键用于启动本装置的自动测试功能;“提起”按键和“释放”按键被配置为手动控制测量杆向前移动或向后移动;控制面板上位于显示屏左方的中间位置还设置有电池指示灯,用于指示内部电池的状态;MCU芯片可利用输入的电梯额定载重量、悬挂比、位移值,以及测量的驱动力的值进行运算,得出电梯的平衡系数。本实施例的一种电梯平衡系数的测量装置中,还设置有电源8;电源8为可充电电池,其为压力传感器、直线位移传感器、AD芯片、MCU芯片、显示屏、增压泵的电机供电。本实施例的一种电梯平衡系数的测量装置,对电梯轿厢侧的曳引绳和电梯对重侧的曳引绳进行测量,测量方法具体按以下步骤进行:一、将测量装置套在所要测量的曳引绳上,两个支承杆位于曳引绳的同一侧,并与曳引绳接触且与曳引绳垂直,使测量杆位于曳引绳且与支承杆相反的另一侧;二、控制位移驱动机构使测量杆和支承杆共同与曳引绳接触,并使测量杆、支承杆与曳引绳之间无明显作用力,以此处位置为位移零点;其中,具体方法为:先启动位移驱动机构使测量杆相对于支承杆夹紧曳引绳,当测驱动力装置测量值明显升高时,关闭位移驱动机构并逐渐撤除驱动力,在曳引绳与测量杆和支承杆皆完全接触,且无明显的驱动力时,即为位移零点;三、控制位移驱动机构通过测位移装置的配合,使测量杆继续移动设定的距离d,在支承杆的配合下,测量杆在移动的同时,使曳引绳的测试点产生相应的位移;四、通过测驱动力装置测量位移驱动机构对测量杆所施加的驱动力F;通过电梯平衡系数公式进行计算得到k值;五、控制位移驱动机构撤除驱动力,取下测量装置,即完成测量;六、测量完成后,将相关参数代入如下电梯平衡系数公式,再通过计算得到k,即为电梯平衡系数; 其中,i为悬挂比,F1为使电梯轿厢侧的曳引绳的测试点产生设定位移时所测得的驱动力,单位N;F2为使电梯对重侧的曳引绳的测试点产生设定位移时所测得的驱动力,单位N;G0为电梯轿厢的额定载重量,单位N;d为所设定的曳引绳测试点的位移值,单位mm;s为两支承杆轴向距离的一半,单位mm;通过前述可知,i、G0、d、s皆为根据已知而设定的参数,而F1、F2为测量所得的数据。本实施例的一种电梯平衡系数的测量装置中,电梯平衡系数公式是按照以下原理推导出来的:如图8所示,对于静止状态、轿厢与对重均悬空的电梯,在电梯曳引绳的同一侧布置两个支承点t1、t3(对应于支承杆与曳引绳的接触点),支承点t1、t3限制电梯曳引绳向垂直于t1-t3的方向横向(左右)移动,且曳引绳在t1、t3处可无阻力地沿曳引绳轴线方向移动。在支承点t1、t3连线的中间位置t2(对应于测量杆与曳引绳的测试点)处向电梯曳引绳施加一个大小为F、指向支承点t1、t3一侧、与曳引绳垂直的横向推力使曳引绳产生位移;记曳引绳的张力为T,曳引绳在t2处的位移为d,曳引绳的张力为T、曳引绳偏离的角度为α,则曳引绳在t2处的反作用力为F;则可得出:
即:
记电梯的额定载重量为G0,轿厢重量为G1,对重重量为G2,轿厢侧、对重侧曳引绳的张力分别为T1、T2,悬挂比为i,在曳引轮两侧的轿厢侧、对重侧曳引绳上测得的反作用力分别为F1、F2,由F1、F2推算得到轿厢重量与对重重量分别为G(1)、G(2)。再次如图8和图9所示,当电梯悬挂比为1∶1时,曳引绳的张力分别等于轿厢的重量或对重的重量,则可得出:
按照电梯平衡系数的定义,可推导出:
再次如图8和图9所示,当电梯悬挂比为2∶1时,曳引绳的张力分别等于轿厢的重量或一半的对重的重量的,则可得出:
可推导出:
同理,当悬挂比为1∶1、2∶1、3∶1、4∶1…i∶1时,可以推导出电梯的平衡系数k为:
其中,i=1、2、3、4、5…。本实施例的一种电梯平衡系数的测量装置中,具体按以下步骤操作来进行一次测试:①打开电源测试人员按“电源开关”键,打开本装置。②设置参数测试人员利用两个选择按键与确认按键设置电梯的额定载重量、悬挂比、位移值、测试分组数。设置上述参数的过程可选择在安装本装置之前或之后进行操作。③在曳引绳上安装本装置将本装置分别安装在曳引轮两侧的轿厢侧、对重侧的曳引绳上进行测量,顺序不分先后。将本装置放置在曳引绳上,支承杆与所有曳引绳接触并且与曳引绳垂直,曳引绳组宜位于两只侧板的中间位置,曳引绳组宜与两侧板无接触。装上测量杆,此时操作人员可以按下“提起”按键让测量杆拉紧曳引绳,以固定本装置,或按下“释放”按键让测量杆松开曳引绳。操作人员也可以不按“提起”键固定测量装置,可以按“测试”键直接进入测试过程。④测试操作人员按下“测试”按键后,MCU芯片控制增压泵工作;MCU芯片先启动增压泵让测量杆推动曳引绳产生位移,当压力传感器测得驱动气缸内的气体压力明显升高时,再关闭增压泵并打开电磁阀,使气缸柱塞在曳引绳张力作用下缩回,当测量杆和支承杆完全接触曳引绳但气缸内的气体压力不明显地高于大气压时,MCU芯片设定此点位置为测试的位移零点。在MCU芯片设定位移零点后,MCU芯片启动增压泵,驱动气缸的活塞推动移动架的移动板带动移动导向板,进而驱动测量杆,使测量杆按设定的位移值移动,使曳引绳测试点的横向位移等于设定值时,MCU芯片关闭增压泵,当测得的曳引绳测试点的位移值能在一定时间内始终等于设定值,压力传感器测量此时驱动气缸内的压力并通过AD芯片转换为数字信号传输给MCU芯片进行处理。当测得的曳引绳测试点处的位移值不等于设定值或不能在一定时间内始终等于设定值时,MCU芯片利用位移传感器提供的测量信号,控制增压泵的启停和电磁阀的开闭,使测得的曳引绳测试点的位移值能在一定时间内始终等于设定值。当测得的曳引绳测试点的位移值能在一定时间内始终等于设定值时,MCU芯片计算测量的压力值和张力值。在此过程中,显示屏显示测得的位移值、压力值和张力值,并提示操作人员进行下一步的操作。⑤拆除本装置按下“释放”键,MCU芯片接收命令,并控制电磁阀开启,气缸内气体泄出,测量杆被松开,操作人员取出测量杆,操作人员将本装置从曳引绳上取下。⑥在完成轿厢侧、对重侧的曳引绳上的测量后,计算电梯的平衡系数,并通过显示屏显示。全部测量完成后,操纵“电源开关”键,关闭本装置。本实施例的一种电梯平衡系数的测量装置,在实际使用过程中,一般情况下,被测电梯的同一组曳引绳排列的总幅宽不大于测量装置两侧板的内侧间距,并且测量装置的气缸驱动能力能克服同一组电梯曳引绳的总张力从而能有效地实现测量功能时,此时只需将测量装置先后安装在轿厢侧、对重侧的同一组所有曳引绳上进行测试后,即可完成一台电梯的平衡系数测量;而当被测电梯的曳引绳排列的总幅宽大于本装置所能测量的最大幅宽时或曳引绳的内部张力过大时,可将曳引绳分成两组以上来测量,如图10所示;此时,设置相应的测试分组数后再进行测试,进行其中一个分组测试后,点选确定按键保存此分组的测试数据,再进行下一个分组的测试,当完成设定组数的测试后,本装置再进行相应的计算,并显示出测得的电梯平衡系数。分组测量可采用两种计算方法来计算电梯的平衡系数:每侧的驱动力为此侧分组测得的驱动力之和,按前述公式计算;或分别对两侧各对应分组的测量结果按前述公式计算出电梯的平衡系数后取平均值。本实施例的一种电梯平衡系数的测量装置中,所提供的是具体的实施例结构,本实施例的测量原理是:对曳引绳的某一点施加与其轴向垂直的力使曳引绳的此点发生位移,进而偏离其轴向,测量位移与所施加的力,即可推导出电梯平衡系数;基于此原理,本装置只要具有以下机构即可实现相应的效果:第一机构,用于使曳引绳的测试点沿与曳引绳轴向垂直的方向产生位移;第二机构,作用于第一机构,用于为第一机构提供使曳引绳的测试点产生位移的驱动力;第三机构,用于测量曳引绳的测试点的位移值;第四机构,用于测量使曳引绳的测试点位移的驱动力。上述实施例不应以任何方式限制本实用新型,凡采用等同替换或等效转换的方式获得的技术方案均落在本实用新型的保护范围内。

企业营业执照
专利注册证原件
身份证
个体户营业执照
身份证
专利注册证原件
专利代理委托书
转让申请书
转让协议
手续合格通知书
专利证书
专利利登记簿副本




提交

公众号
全国技术转移公共服务平台