
- 技术(专利)类型 发明专利
- 申请号/专利号 200910163802.3
- 技术(专利)名称 定日镜及定向反光设备和阳光跟踪与聚光方法
- 项目单位
- 发明人 曹宏海
- 行业类别 人类生活必需品
- 技术成熟度 详情咨询
- 交易价格 ¥面议
- 联系人 曹宏海
- 发布时间 2022-03-09
 北京
北京
客服热线:010-83278899
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们
 北京
北京
客服热线:010-83278899
微信公众号 扫一扫 关注我们

项目简介
一:项目简介
新概念定日镜:“wdsz—9定日镜”正式内测成功,
“wdsz—9定日镜”的创新点在于:第一、新在低成本;第
二、新在纯机械无电子设备(当然有人愿意硬把“wdsz—9
定日镜”加装电子设备也可以更好地运行);第三、新在独
特的原理;第四、新在特殊的结构以及适合不同地域的改进
变型。
气候变化即全球变暖的危害自不必说,“碳中和”是
各国应对气候变化的当务之急,太阳能聚光设备——定日
镜,产生的高温光热应用,光电转换效率高,前景广阔,但
现阶段的定日镜以及各发达国家顶尖实验室在研的定日镜
有一个共同的缺点:造价高昂,且驱动他们的能量和他们聚
光产生的能量性价比不高,运行维护成本高昂……
譬如以下的讯息不胜枚举:
《美国Skysun研发新型“联动定日镜”,或将塔式定日镜成
本削减30%以上(2017)》
《目标50美元/㎡!NREL牵头成立国际联合研发团队推动定
日镜尽快降成本(2021-12-22)》
换句话说,改变全球变暖的关键是全球快速实现“碳中
和”,实现“碳中和”的途径是清洁能源的应用,清洁能源
当中太阳能是重要的发展方向,太阳能领域当中高温光热是
效率最高的应用,实现高温光热的关键是降低“定日镜”的
制造和运维成本,所以造价低廉、高精度聚光、防风性能强
的“定日镜”是所有问题的决定性因素。虽然全球各个企业
和国家实验室不遗余力地研发低成本定日镜,始终没有任何
进展。但是近日,满足以上苛刻要求的“定日镜”取得突破:
“wdsz—9定日镜”正式内测成功:w代表无电子设备,d
代表低成本,sz代表受控式自由,9代表第九代。
“wdsz—9定日镜”是第九代产品:是第二代产品“中
国发明专利200810149880.3及200910163802.3”的全面改
进,第二代wdsz—2(试验时间是2013年冬天——与国内
顶尖电控研究所交流后,被指出虽抛弃电子设备,但在节约
成本方面还有潜力可挖,并且给与了鼓励):

下图是第二代实验样品(2008年——2013年):

值得一提,直到2017年美国桑迪亚国家实验室也有了外形
类似第二代wdsz—2的产品……,中国发明专利(不是实用
新型专利):200810149880.3及200910163802.3在先,桑
迪亚国家实验室(是全球光热发电行业的领先研究机构)在
后,但桑迪亚国家实验室为电控式设备,所以其要领桑迪亚
国家实验室并没有掌握。而2022年以来,桑迪亚国家实验
室(SandiaNationalLaboratories,SNL)和澳大利亚太阳
能热研究所参与成立了名为HelioCon的国际联合研发团队,
目标是旨在研发将定日镜成本降低至50美元/㎡(约合人民
币320元/㎡),以助力下一代光热发电项目实现度电成本
降低至0.05美元/kWh(约合人民币0.32元/kWh)的发展目
标。可见“wdsz—9定日镜”(每平米人民币180元)的
领先程度。
吸取各方面的建议后,2013年底抛弃第二代,全面改
进,从第三代、第四代、第五代直至顶级的第九代wdsz—9
在2020研制成功,2021年国庆期间“wdsz—9定日镜”正
样设备实验成功。
二:项目核心创新点
2021年国庆期间“wdsz—9定日镜”正样设备进行
了实验,相比于现阶段各国运行和在研的定日镜,“wdsz—9
定日镜”具有突出优点:成本低——制造成本运行及维护
成本都比现有和各发达国家在研的定日镜低廉,现有和各发
达国家在研定日镜每一面镜子需要两个步进电机和一套电
子电控设备,一个镜场假如有1000面镜子就需要2000个
步进电机,1000套电子设备控制双轴跟踪(更精确的用伺服
电机)而且技术核心欧美大公司垄断;而“wdsz—9定日镜”
不需要电子设备——是纯机械全自动跟踪,独门技术全部国
产化,假如一个镜场有1000面镜子,则只需要1至3个普
通电机,即不会超过3个普通电机。成本:人民币(每平米
180元以下。而世界顶尖的研发机构比如欧美近日才开始要
研发每平米320元的定日镜),运行成本是欧美现有和在研
的定日镜的十分之一,防风性能,精度均大幅度优于欧美现
有和在研的定日镜,10000米距离全年光斑中心移动不超过
20厘米。


三:项目详细用途
新概念“wdsz—9定日镜”将为塔式太阳能发电、采暖供热、
制氢、空调等工业热源驱动领域提供廉价的清洁能源。

四:预期效益说明
总之达到预期效果:1精确的大规模聚光可以不依赖昂贵的
精密设备。2合理的设备可以摆脱电子装置;反之只有设备
结构合理以后,再加装电子设备才能具备机电一体化的意
义,尤其在注重节约成本的新能源领域。3光热发电的效率
是其他太阳能技术不可比拟的,而定日镜的成本是普及太阳
能高温光热应用的关键,经过多年的研制创新,高精度、低
成本、强防风的太阳能聚光设备已经成体系化和系列化,尤
其适合不同地域的各变形结构让低成本太阳能聚光很方便。
其中具有代表意义的“wdsz—9定日镜”,必然为快速实现
碳中和铺平道路。届时将开启万亿价值市场,因为在碳中和
的大环境中,性能满足要求的新概念定日镜“wdsz—9定日
镜”将大行其道大放异彩,并且将创造全新的产业链,解决
一大批人员就业。对于正在研发的其他新能源设备,譬如:
“人造太阳——热核聚变”来说,新概念“wdsz—9定日镜”
十分成熟唾手可得,已经站在新能源舞台中央。
效果图:

定日镜及定向反光设备和阳光跟踪与聚光方法,属太阳能高温应用领域,是非电控精确跟踪阳光并聚光的方法和加热设备,用来解决电控式定日镜,成本较高的问题;第二杆体(2)与第一平面镜(29)铰接,可伸缩的第三杆体(3)一端与可转动的旋转支架体(35)铰接,另一端与第一平面镜(29)连接;使第二杆体(2)与地轴平行,使法线(28)与第二杆体(2)上45°圆锥曲面的角度为当天赤纬角的1/2,当到达阳光高度角最大时刻,该时刻精确到秒,则与阳光同步驱动可转动的旋转支架体(35),得到和第二杆体(2)重合的方向不变的反射光线(34);若干该设备达到聚光加热目的。
说明书
技术领域 本发明涉及太阳能应用领域中对阳光进行精确跟踪并聚光的方法,和一种定日镜及定向反光设备,特别非电控类型。背景技术 太阳能是人类重要的资源,在太阳能应用领域存在如何方便地大规模聚光的问题。由于太阳是运动的光源,解决大规模聚光问题的难点在于,如何用简便的方法和低成本而可靠的设备来跟踪太阳光,然后用许多平面镜使阳光聚集到一点。现阶段人们多采用电控设备来跟踪并聚光,存在成本高的缺点,如中国专利号:200410104079.9公开号CN1789858。所以低成本精确跟踪太阳光并聚光的设备是普遍应用太阳能的关键,检索未有同类设备的专利报导。发明内容 本发明的目的旨在解决太阳能应用领域中,如何无须电控设备,跟踪阳光并用许多平面镜聚光的一种方法,和一种非电控精确聚光的定日镜及定向反光设备,是工业上的新能源加热设备。技术方案 一种太阳能应用领域中跟踪阳光的方法:地表须跟踪阳光的地点本文称为目标点,从目标点出发设定一根平行于地轴的直线,使平行于地轴的直线上,任一点出发的跟踪阳光的直线,与平行于地轴的直线之间的角度变化,同阳光与地轴间的角度变化相同,并随阳光同步转动即可跟踪阳光。原理,地轴与阳光的夹角由于地球的自转和公转有如下规律:在任一时刻地轴与阳光光线相交成一个平面,在下一刻地轴与阳光相交又成另一个平面,统计整个回归年中的所有平面,其中地轴与阳光相交的角度关系是锥角变化的类圆锥形轨迹。平行于地轴的直线,任一时刻和地轴均平行,又由于阳光是平行光,所以地轴平行线与阳光相交的角度,和地轴与阳光相交的角度为大小相等方向相同的两个量。所以只要把“跟踪阳光的直线与平行于地轴的直线相交的角度”保持同“地轴与阳光相交的角度”一致,并匀速旋转一周一个当天真太阳日(本文将其命名为“常速”),随阳光运动方向转动平行于地轴的直线,即可精确跟踪阳光。方法如下:(1)确定目标点阳光阴影的“最短时刻立面”。实施阳光跟踪的前一天或前几天,记录目标点地理意义上的正午时刻即目标点太阳高度角最大时刻,这一时刻特征是:目标点上垂直于水平面的线段,全天中在水平面上的阳光阴影长度最短,本文将这一时刻,命名为目标点的“正午时刻”;该时刻每天不同,该时刻日心与地心连线(虚拟的连线)同目标点的经度线相交,该时刻目标点在阳光与地轴相交所确立的平面内,在本文该平面称之为“最短时刻立面”;且这一时刻目标点垂直水平面的线段,与其阴影确立的平面同“最短时刻立面”重合,由此可确定“最短时刻立面”,该“最短时刻立面”必然穿过地球南北极的两个地轴点。并且从地表该点设定一根直线,称为准地轴平行线。(2)确定当天赤纬角。通过计算实施阳光跟踪当天的赤纬角,可间接计算出阳光与地轴的角度。使准地轴平行线上出发的跟踪阳光的直线与准地轴平行线的角度,同当天阳光与地轴的角度相同。使准地轴平行线和跟踪阳光的直线,均处于“最短时刻立面”中。(3)确定地轴平行线。实施阳光跟踪当天,使准地轴平行线和水平面的角度与目标点的纬度相同。或当到达目标点“正午时刻”,在“最短时刻立面”中以目标点为轴,调节准地轴平行线与水平面的角度,使跟踪阳光的直线与阳光光线重合或平行,这时的准地轴平行线位置与地轴平行,称为地轴平行
线。(4)在目标点“正午时刻”,使跟踪阳光的直线围绕地轴平行线,以“常速”随阳光转动,同时保持两者的角度,同阳光与地轴的角度的变化相同,即可跟踪阳光。并且确定了地轴平行线,以后就不需重复前3个步骤。为间接计算出阳光与地轴的角度:其中赤纬角,可以从《太阳能SOLAR ENERGY》期刊,国际标准刊号:ISSN1003-0417,国内统一刊号CN11-1660,1999年第2期No.2起止页码:8-10页,中国气象科学研究院王炳忠研究员关于太阳赤纬角的计算公式当中求得,即地轴与阳光的角度可以通过赤纬角间接地求得,摘录如下,日地中心的连线与赤道面间的夹角时刻变化,这个角度称为太阳赤纬角,它在春分和秋分时刻等于零,而在夏至和冬至时刻有极值,分别为正负23.442°,即以赤道面为中心,偏北极侧为正值,偏南极侧为负值。赤纬角ED为:ED=0.3723+23.2567sinθ+0.1149sin2θ-0.1712sin3θ-0.758cosθ+0.3656cos2θ+0.0201cos3θ。其中时差公式:时差Et=0.0028-1.9857sinθ+9.9059sin2θ-7.0924cosθ-0.6882cos2θ;其中ED单位是十进制的度,Et单位是十进制的分钟,θ为日角,即θ=2πt/365.2422,这里t又由两部分组成,即t=N-No,其中N为积日,就是日期在年内的顺序号,1月1日的积日为1,平年12月31日的积日为365,闰年则为366等等。No=79.6764+0.2422×(年份-1985)-INT[(年份-1985)/4]。不以弧度以角度制计算时π为180°。具体方法如下:精确确定地轴平行线和“正午时刻”是本文中的关键。本文除两处以外均以中国日历为标准来参考,以北京时间即东经120°为标准,西经60°为日期分界线;并且本方案中在夏至和冬至日当天是调节时间无法实施跟踪与聚光。本文中的“时差”指真太阳日与平太阳日间的时间差,而各地间由于经度不同而造成的时差在本文中命名为“地理时差”。在本文中目标点的“正午时刻”即太阳高度角最大时刻的北京时间(须精确到秒)、该“正午时刻”的赤纬角(须精确到1/3600度)、当天真太阳日(须精确到秒)以及当天赤纬角的变化量(须精确到1/3600度)对阳光跟踪十分重要,四者的精确性对本发明的结果有影响;即日地中心连线,到达目标点所在的经度线(该经度线须精确到1/3600度)这一时刻的北京时间须精确到秒,该时刻赤纬角须精确到1/3600度。设定Et为当天时差,ΔS为当天真太阳日与平太阳日之差。确定点101即目标点的“正午时刻”,这一时刻的点101在“最短时刻立面”中,线段113在水平面上的阴影长度在全天中最短,该时刻是观测值与计算值的统一。设定Sz为真太阳时,Sp为平太阳时,式1:Sz=Sp+Et该式为现有公认的真平太阳时换算公式。设定Z为真太阳日,一个真太阳日是太阳中心接连两次通过同一个子午圈所需要的时间,即太阳中心与地心连线两次通过同一经度的时间,真太阳日Z可以表达为24小时+ΔS(真太阳日大于平太阳日ΔS是正值反之为负值,全年为29秒到负21秒之间)。曲此在本文中可推导出如下公式即式2、3和4。设n为全年中的任一天,n+1为该天的第二天,点101在东经120°,任一天n开始时刻,日地中心的连线在西经60°,是真太阳日的零时即真太阳时等于0,而平太阳时为SP(n),即真太阳时的零时与平太阳时的关系为0=SP(n)+Et(n)。经过一段时间日地中心的连线又在西经60°时,该时刻为任一天n的结束时刻即第二天n+1天的开始,该时间段是一个完整的真太阳日即24小时+ΔS,这时真太阳时仍为零时,即0=SP(n+1)+Et(n+1)。由于经过了24小时+ΔS这一段时间,所以任一天n结束时刻的平太阳时SP(n+1)=SP(n)+ΔS,在0=SP(n)+Et(n)与0=SP(n+1)+Et(n+1)两式中可以得到ΔS=[Et(n)-Et(n+1)],所以Z=24小时
+[Et(n)-Et(n+1)]。同理其他地点的推导与上述相同,例如点101的经度在0°时,日期分界线为东经180°(第一处不以北京时间为标准),则使用格林尼治时间来推导,Z仍为24小时+[Et(n)-Et(n+1)]。结论:所以地表任一点101在全年中的任一天n的真太阳日为Z=24小时+[Et(n)-Et(n+1)]。得到式2:任一天n的真太阳日减去平太阳日的差ΔS=[Et(n)-Et(n+1)]。由赤纬角公式可得到当天的赤纬角ED,该赤纬角是以格林尼治时间的零时为标准来参考的,而北京时间比格林尼治时间早8小时即1/3天,因此西经60°的赤纬角在本文中设为ED°,即日角公式中θ=2πt/365.2422中,t=(N-1/3)-No,代入ED公式即可得到ED°。从北极向南极看以西经60°开始顺时针为方向,当点101的经度与西经60°差1度时,t=(N-1/3+1/360)-No,代入ED公式即可得到点101的赤纬角,相差M度时设M为两者相差的经度,M可以精确到1/3600度,则t=[N-1/3+M×(1/360)]-No,该式命名为式4,代入ED公式得到点101当天“正午时刻”的赤纬角,即点101“正午时刻”的赤纬角在本文设为ED1。同理将t=[N-1/3+M×(1/360)]-No代入Et,得到点101的“正午时刻”的时差。将ΔS转化为以秒为单位。当天一个完整的真太阳日,阳光光线转过一周360°的经度,则平均每秒阳光转过的经度值为360°÷(24×60×60+ΔS),即两个匀速旋转速度的迭加:自转的恒星日与公转在一个太阳日内的速度(必须将此速度认为是匀速)的迭加。从北极向南极看以西经60°开始顺时针为方向任一目标点的“正午时刻”为:目标点和西经60°相差360°÷(24×60×60+ΔS)经度,目标点“正午时刻”的真太阳时为1秒。设H为360°÷(24×60×60+ΔS)的倍数,差H个[360°÷(24×60×60+ΔS)]经度,则目标点“正午时刻”的真太阳时为H秒,记录该数据。目标点“正午时刻”的真太阳时即为式3:H=Sp+Et(Sp为当天目标点“正午时刻”的平太阳时,Et为当天目标点所在经度“正午时刻”的时差)。即目标点“正午时刻”的平太阳时Sp(北京时间)都可得到。例如东经179.55°,在2006年9月22日,“正午时刻”的北京时间是:由Et公式可知2006年9月22日西经60°的时差为7分15.53秒,2006年9月23日西经60°的时差为7分37.72秒,则ΔS为-22.19秒。东经179.55°与西经0相差120.45°(目标点与西经0的差,须精确到1/3600度)即H为120.45°÷[360°÷(24×60×60-22.19)]=28900.58秒,则东经179.55°在2006年9月22日的“正午时刻”的真太阳时为:28900.58秒=Sp+7分23秒(7分23秒为2006年9月22日东经179.55°的Et),即8小时1分40.58秒=Sp+7分23秒,即东经179.55°在2006年9月22日的“正午时刻”平太阳时(北京时间)Sp=7点54分17.58秒。计算过程中,角度、经度及经度差可以用十进制;时间可以用十进制的分钟及秒。图1中点101为目标点,直线102为从点101出发的直线,可称其为准地轴平行线,点109为准地轴平行直线102上的任一点,直线103为需跟踪阳光的直线,直线110和直线112为二至时分直线103的位置,直线105和直线107为二至时分阳光的位置,直线104为从直线102上的点108出发的直线,直线104也是射到点108的阳光光线,其中直线104从直线105至直线107,和直线103从直线110至直线112的角度均为46.884°。直线106、直线111均为和直线102垂直的直线,即二分时刻阳光与直线102的位置,包含直线106或直线111且垂直于直线102的平面可称之为赤道平行面。线段113为点101上垂直于水平面的线段,直线28为从点109出发的平面镜29的法线。图2中:地心为O,线段
113为点101上垂直于水平面的线段,地轴为114,赤道为115,阳光光线与线段113的交点为点116,也是线段113的顶点,阳光光线为117a、117b及117c,水平面为120,阳光与水平面的交点121即Q位置。其中I为点101纬度大于23.442°时的情况,II为点101纬度小于23.442°的情况。跟踪阳光的操作,图1中的点101位于北半球时。(1)确定点101的“最短时刻立面”。实施操作的前几天,该“最短时刻立面”这样确定,一个垂足在点101处,顶点在空中2米至100米间高度的铅垂线即线段113,点101所在的地表为水平面,当达到点101“正午时刻”那一秒,标记下铅垂线顶点的阳光阴影位置,注意由于阳光衍射现象该位置不容易直接观察,可在到达点101“正午时刻”那一秒,标记日心与铅垂线顶点之间连线的延长线设为直线L,与水平面的相交点(称为Q位置):使直线L与铅垂线的角度,同点101的纬度值减去点101“正午时刻”赤纬角的差相等,在到达点101“正午时刻”那一秒,旋转铅垂线,当铅垂线顶点出发的直线L指在日心时,直线L和水平面的相交点,为Q位置。或者将直线L换成直管,阳光光线穿过直管形成光斑的中心点即为Q位置。Q位置、点101和铅垂线的顶点确定的垂直于水平面的立面为“最短时刻立面”。使直线102、直线103、直线104和直线106,均在“最短时刻立面”中。(2)确定赤纬角,实施跟踪操作当天,使直线104与直线106的角度,和点101“正午时刻”的赤纬角相同。并使直线103与直线104平行。(3)确定地轴平行线。实施操作当天在“最短时刻立面”中,令直线102以点101为轴,使直线102与水平面的角度同点101的纬度值相等(图2中:图I或图II的直线102与水平面120的角度即∠102、101、120该角度设为α,线段113垂直于水平面即地表切面,线段113的延长线必然穿过地心O;点101的地轴平行线102与地轴114平行,线段113与两者的角度相等即∠102、101、116=∠114、0、116,即同时与两个平行直线相交的直线其同位角相等。90°减去∠114、0、116为点101的纬度,90°减去∠102、101、116为α,所以α同点101的纬度值相等。同理在到达点101“正午时刻”那一时刻,日心到铅垂线顶点116之间连线的延长线L,即117a与铅垂线113的角度∠121、116、101,同点101的纬度值减去点101“正午时刻”赤纬角的差相等,因为两者是:铅垂直线113与两平行光线117a及117b相交的内错角,内错角相等),这时直线102的位置为点101的地轴平行线位置。或者当到达线段113阴影最短这一时刻,即“正午时刻”(该“正午时刻”可以由式2、式3与式4得到),在5秒内,令直线102以点101为轴,调节直线102与水平面的角度,直到使直线104和射到点108的阳光光线重合或平行。这时直线102的位置为点101的地轴平行线位置。(4)当到达点101“正午时刻”,从点109向点108看顺时针以“常速”驱动直线102,同时使直线103相对于直线111所在的赤道平行面的角度变化,同赤纬角的变化相同。注意:地轴平行线102应和南极至北极的方向相同。图1中当点101在南半球时,并且使用中国日历为参考,以下二分二至均为北半球意义的二分二至,即直线105位置和直线110位置为北半球冬至南半球的夏至时刻,直线107位置和直线112位置为北半球夏至南半球的冬至时刻。具体步骤不同的如下:(4)当到达点101“正午时刻”,从点109向点108看逆时针以“常速”驱动直线102,同时使直线103相对于直线111所在的赤道平行面的角度变化,同赤纬角的变化相同。注意:从地表点101出发的直线102应和北极至南极的方向相同。校准地轴平行线的具体方法为,重点在于步骤(2)确定赤纬角,春分日的前一天我们先得到春分时刻春分点的经度值,目标点101的经度正好在春分点的经度线上,则使
直线104与直线106重合;如果目标点101在春分点经度线的东侧和西经60°之间,当点101与春分点的经度差1度时,直线104与直线106的角度为γ春分日÷360,春分日全天赤纬角变化量设为γ春分日,该值为西经60°春分日开始时的赤纬角与春分日结束时赤纬角之差。差M度时(设M为相差数值)直线104与直线106的角度为M×γ春分日÷360,且直线104在直线106的南侧(稍微偏向南极侧)。反之如果点101在春分点经度线的西侧和西经60°之间,当点101的经度与春分点的经度差M度时直线104与直线106的角度为M×γ春分日÷360,并且使直线104在直线106的北侧(稍微偏北极侧)。其余步骤与北半球跟踪操作相同。统计各年,以精确到小时为标准,得到夏至时刻到冬至时刻有183个太阳日加12个小时即183+1/2个太阳日,夏至时刻到秋分时刻有93+2/3个太阳日,秋分时刻到冬至时刻有89+5/6个太阳日。冬至时刻到夏至时刻有181+3/4个太阳日,冬至时刻到春分时刻有89个太阳日,春分时刻到夏至时刻有92+3/4个太阳日。本文将秋分点的赤纬角设定为ED(B94),秋分点开始同一经度线上,前一完整太阳日的赤纬角设定为ED(B93),再前一太阳日设定为ED(B92),直至ED(B1),ED(B1)必然是夏至时刻开始经过16个小时后的赤纬角;秋分点后第二个完整太阳日的赤纬角为ED(B95),秋分点后第三个太阳日的赤纬角为ED(B96),直至ED(B183)即冬至时刻之前20个小时时刻的赤纬角。(此处为第二处不以北京时间即东经120°为标准,西经60°为日期分界线)。把冬至点(该点的经度线和春分点的经度线重合)的赤纬角设为ED(y1),春分点同一经度线上,一个完整的真太阳日后的赤纬角设为ED(y2),同理得到ED(y3)及其他各值,直至夏至前18个小时时刻,ED(y90)为春分时刻的赤纬角。在本文中选用2006年至2007年完整的一个回归年中的各ED(B)、ED(y)值为标准。实际每年的ED(B1)有微小变化,如为提高精度可选用十年的ED(B1)平均值来解决,同理其他ED(B)、ED(y)均可用平均值来解决。说明一下平面镜29如何将阳光反射到与地轴平行线重合,并始终保持反射光线方向不变。将平面镜的法线保持在阳光与地轴平行线相交而确立平面内即法线跟踪阳光转动,并且使“阳光与法线的角度”和“反射光线即地轴平行线与法线的角度”相等,则平面镜反射的阳光与地轴平行线重合。即点101在北半球时,从夏至到冬至或从冬至到夏至,法线28与反射光线(该光线为点101至109方向,从点109出发和直线102重合的直线)的角度,由33.279°变化到56.721°或由56.721°变化至33.279°,二分时刻入射光线垂直于地轴平行线,法线28与反射光线的角度为45°。本文中把从点109出发,与点101至109方向的地轴平行线的夹角呈45°的所有射线,所围成的虚拟圆锥型曲面命名为“45°圆锥面”。法线28在夏至时刻与“45°圆锥面”的角度为11.721°,等同于法线28与反射光线的角度33.279°,冬至时刻与“45°圆锥面”的角度为-11.721°,即法线28与反射光线的角度56.721°,二分时刻法线28与“45°圆锥面”重合角度为0°,即法线28与反射光线的角度45°。定向反射阳光的操作,(1)首先确定地表将要进行阳光跟踪与聚光地点的阳光高度角最大的时刻,该时刻精确至秒;即确定“最短时刻立面”;同阳光跟踪的操作步骤(1)相同,并使直线102、直线104、直线106、线段113和法线28均在“最短时刻立面”中。(2)其次确定赤纬角及法线的角度,即法线与“45°圆锥面”的角度;实施聚光操作当天,在“最短时刻立面”中使直线104与直线106的角度,和当天点101“正午时刻”的赤纬角ED1相同,
使法线28与“45°圆锥面”的角度为赤纬角ED1/2。使法线28在入射光线和反射光线之间。(3)然后确定地轴平行线;同阳光跟踪的操作步骤(3)相同。(4)最后与阳光同步驱动地轴平行线。从点109向点108看顺时针以“常速”驱动直线102,同时始终使法线28与“45°圆锥面”的角度变化量为赤纬角的变化量1/2,并且使法线28相对于“45°圆锥面”的角度变化方向,同阳光与赤道平行面的角度变化方向相同。以上步骤(3)至(4)操作5秒钟内完成。图1中当点101在南半球时,并且使用中国日历为参考,以下二分二至均为北半球意义的二分二至,即位置105和位置110为北半球冬至南半球的夏至时刻,位置107和位置112为北半球夏至南半球的冬至时刻,反射光线为点101至109方向,从点109出发与直线102重合的光线。法线28在南半球的冬至时刻与“45°圆锥面”的角度为11.721°,在南半球的夏至时刻与“45°圆锥面”的角度为-11.721°,二分时刻与“45°圆锥面”重合。定向反射阳光的操作,不同步骤在于(4)从点109向点108看逆时针以“常速”驱动直线102,同时使法线28与“45°圆锥面”的角度变化量,始终为赤纬角变化量1/2,并且使法线28相对于“45°圆锥面”的角度变化方向,同阳光与赤道平行面的角度变化方向相同。由以上原理及方法,本文中定日镜的基本构思是:定日镜由控制系统即驱动设备的定时装置、原动机即驱动设备、传动机构和执行机构即定向反光设备组成;机架上有若干(指1个至十万个之间)定向反光设备(能使反射的阳光光线方向固定的设备);每套定向反光设备包括可活动连接在所述机架上的第一杆体,即所述第一杆体与机架可以是活动连接(卡式连接或铰接等)或固定连接(直接使所述第一杆体及机架的角度制成地轴平行线的角度),第一平面镜和可伸缩的第三杆体连接并与可转动的杆体铰接,调节螺旋传动的第二杆体与所述第一杆体,可使第一平面镜的反射光线与地轴平行线重合,当平面镜随阳光方向同步旋转时,第二杆体相对于所述第一杆体旋转并轴向位移,即带动第一平面镜旋转的同时,改变了其法线与地轴平行线的角度,使反射光线始终与地轴平行线重合,成为固定方向的光束,经反射镜反射到需加热的物体上,若干设备组成的定日镜可产生热源。作为实现所述基本构思的第一种技术方案较合适的结构为:定日镜,包括机架,驱动设备和传动装置,以及反射镜,所述机架上包括若干套定向反光设备,每套所述定向反光设备包括第一杆体,第一平面镜,可活动连接在所述机架上的所述第一杆体,活动连接的所述第一杆体与可转动的第二杆体;连在一起的所述第一平面镜和可伸缩的第三杆体,与所述可转动的第二杆体铰接;所述可伸缩的第三杆体与可转动的旋转支架体铰接,所述可转动的旋转支架体在支撑装置上。作为实现所述基本构思的第二种技术方案较合适的结构为:定日镜,包括机架,驱动设备和传动装置,以及反射镜,所述机架上包括若干套定向反光设备,所述定向反光设备的第一杆体和所述机架通过铰链相连,可观察阳光光线的第四杆体通过第二个铰链与所述第一杆体相连,以及第一平面镜,活动连接的所述第一杆体与可转动的第二杆体;连在一起的所述第一平面镜和可伸缩的第三杆体,通过第三个铰链与所述可转动的第二杆体相连;所述可伸缩的第三杆体通过第四个铰链和可转动的旋转支架体相连;所述可转动的旋转支架体在支撑装置的上,所述支撑装置与所述第一杆体相连,所述可转动的旋转支架体与所述传动装置相连。作为实现所述基本构思的第三种技术方案较合适的结构为:定日镜,包括机架,驱动设备和传动装置,以及反射镜,所述机架上包括若干套定向反光设备,每套所述定向反光
设备包括至少分成两部分可相对转动的第一杆体,以及第一平面镜,可活动连接在所述机架上的所述第一杆体;活动连接的所述第一杆体与可转动的第二杆体;连在一起的所述第一平面镜和可伸缩的第三杆体,与所述第一杆体铰接;所述可伸缩的第三杆体与旋转支架体铰接;所述旋转支架体与支撑装置相连,所述支撑装置与所述可转动的第二杆体连接。作为实现所述基本构思的第四种技术方案较合适的结构为:定向反光设备,所述定向反光设备包括第一平面镜,活动连接的第一杆体与可转动的第二杆体;连在一起的所述第一平面镜和可伸缩的第三杆体,与所述可转动的第二杆体铰接;所述可伸缩的第三杆体与可转动的旋转支架体铰接;所述可转动的旋转支架体在支撑装置上,可连接在所述第一杆体上的所述支撑装置。作为实现所述基本构思的第五种技术方案较合适的结构为:定向反光设备,所述定向反光设备包括至少分成两部分可相对转动的第一杆体,以及第一平面镜,活动连接的所述第一杆体与可转动的第二杆体;连在一起的所述第一平面镜和可伸缩的第三杆体,与所述第一杆体铰接;所述可伸缩的第三杆体与旋转支架体铰接;所述旋转支架体与支撑装置相连,所述支撑装置与所述可转动的第二杆体连接。作为所述第一种技术方案的改进,可以固定连接的所述第一杆体和所述机架,所述支撑装置可以与所述机架连接,所述传动装置可以为链条,所述传动装置可以与所述可转动的旋转支架体相连;所述支撑装置上可以有支撑体,以及套在一起的所述支撑体与所述可转动的旋转支架体。作为所述的第一种及第二种技术方案的一种改进,所述第二杆体可以在所述第一杆体中,第五杆体在所述第一杆体上,所述第五杆体与所述第二杆体上的螺纹相啮合;所述第一杆体和所述机架可以通过铰链相连,所述支撑装置可以在所述第一杆体上;所述支撑装置上的支撑体可以为大轮,所述可转动的旋转支架体可以在所述大轮的凹槽中,所述反射镜可以为平面镜,调节机构可以在所述第一杆体上。作为所述的前三种技术方案的一种改进,可以为螺旋传动的所述第一杆体与所述可转动的第二杆体;所述第一杆体可以在所述第二杆体中,第五杆体在所述第二杆体上,所述第五杆体与所述第一杆体上的螺纹相啮合;所述传动装置可以为齿轮,所述传动装置可以与所述可转动的旋转支架体相啮合;调节机构可以在机架上,所述驱动设备可以为电机,所述反射镜可以为凹面镜;所述支撑装置的一端可以是框架式支撑体,轮可以与所述框架式支架体相连,所述轮可以在所述旋转支架体的凹槽中,所述驱动设备可以在所述框架式支撑体上。作为所述第四种及第五种技术方案的一种改进,可活动连接在机架上的所述第一杆体;螺旋传动的所述第一杆体与所述第二杆体;所述第二杆体可以在所述第一杆体中,第五杆体在所述第一杆体上,所述第五杆体与所述第二杆体上的螺纹相啮合;所述支撑装置上可以有支撑体,以及套在一起的所述支撑体与所述可转动的旋转支架体。各杆体可以是杆、管或带管的杆,调整至正常运转时,每套定向反光设备中第一杆体与水平面确立的平面均相互平行且垂直于水平面;可伸缩的第三杆体为至少两个套在一起,能自由伸缩的杆体。可转动的旋转支架体所在的平面为赤道平行面,第四个铰链使可伸缩的第三杆体调节与赤道平行面的角度。可转动的旋转支架体在支撑装置上指弧型或O型支撑体包裹在旋转支架上,或旋转支架的边缘有凹槽导轨,球、轮等型支撑体在凹槽型导轨
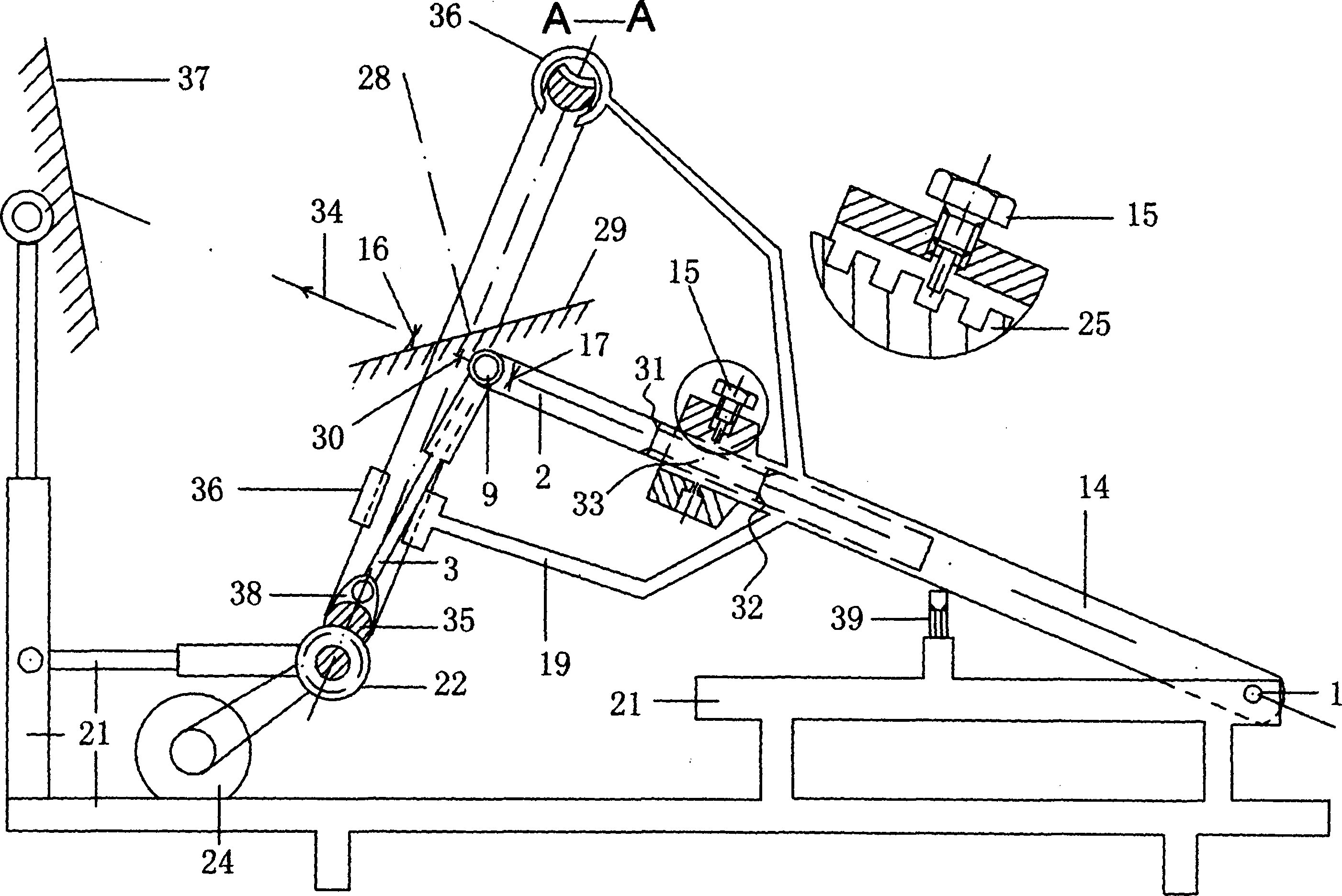
中;或所述支撑装置的一端可以与旋转支架体组成轴承式连接;本文中凡支撑旋转支架体的各种形状物体均称为支撑体。驱动设备的传动装置可以是蜗杆,第一杆体垂直于可转动的旋转支架体的中心。第一杆体上或第二杆体上有连续的螺纹,第二杆体上或第一杆体上有1个或2个以上个螺孔,用来调节法线与地轴平行线的角度。连在一起的第一平面镜和可伸缩的第三杆体,与第二杆体铰接:指可伸缩的第三杆体与所述第一平面镜可活动连接或固定地连在一起,且两者所呈的角度固定不变;第一平面镜、可伸缩的第三杆体或连在一起处又与可转动的杆体铰接。本文设备的各转动或有相互位移关系的接触零件均可用同种材料制作以防气温变化而卡滞或松旷,尺寸公差配合应合理相互不松旷又转动自如。有益效果 作为大规模聚光,高温利用太阳能的定日镜设备,在整个聚光系统中,加热物体及反射镜37固定,只有第一平面镜29的单轴转动,实验证明每一束反光光线长1000米内,全年光斑中心移动小于20厘米。由于无须电控装置,降低了成本,提高了太阳能应用的意义。该设备适合工业生产中多种领域,如:太阳能热电,供暖等领域。该结构有利于整体集成,规模化应用,和防风:当采用驱动旋转支架时,力矩小电机功率无须过大,所以通过连动机构可以由一个电机同时驱动多个定向反光设备;现有的精确聚光设备其每一面平面镜多采用两个电机和一个单片机,因此本结构的优点在于低成本,便于普及有利于减少温室气体排放,节能环保。附图说明:图1为阳光跟踪方法的原理图。图2为日心与地心连线,同目标点101所在的经度线相交时刻地球的剖面图。图5为定日镜的立体简化图。图6为定日镜的两个实施例,点9至点1方向俯视结构图。图3、4、7和图8为定日镜的实施例侧面结构图(图3、4、7和8中旋转支架体为剖面图)。具体实施方式:其中一种优选的定日镜实施例为图3,定日镜,包括机架21,驱动设备24和传动装置22,以及反射镜37,所述机架21上包括若干套定向反光设备,每套所述定向反光设备包括第一杆体14,第一平面镜29,可活动连接在所述机架21上的所述第一杆体14,活动连接的所述第一杆体14与可转动的第二杆体2;连在一起的所述第一平面镜29和可伸缩的第三杆体3,与所述可转动的第二杆体2铰接;所述可伸缩的第三杆体3与可转动的旋转支架体35铰接,所述可转动的旋转支架体35在支撑装置19上。第二杆体2在所述第一杆体14中,第五杆体15在所述第一杆体14上,第五杆体15端部与所述第二杆体2上的螺纹25相啮合,所述支撑装置19上有支撑体36,以及套在一起的支撑体36与所述可转动的旋转支架体35。即支撑体36套在旋转支架体35上。所述驱动设备24在所述机架21上。所述传动装置22是蜗杆,第二杆体2垂直于旋转支架体35(可以是涡轮)外圆的中心。调节机构39在机架21上。首先说明各零件结构的位置、相互关系和功能特性:机架21可调节至与水平面平行。第一杆体14通过铰链1和机架21铰接,能在垂直于水平面的平面中,调节与水平面的角度。第一杆体14带圆柱体空腔,第二杆体2在第一杆体14中且刚好自由转动。固定连接的所述第一平面镜29和可伸缩的第三杆体3,通过第三个铰链9与第二杆体2铰接,第三个铰链9的轴心穿过第二杆体2的轴向中心线。第一平面镜29的法线28同可伸缩的第三杆体3中心线的角度,即第三个铰链9轴心与第四个铰链38轴心的连线,与法线28的角度呈始终不变的(90+45)°角度即∠38、9、28=135°,第三个铰链9在该固定一体处。可伸缩的第三杆体3的另一端,通过第四个铰链38与可转动的旋转支架体35相连。旋转支架
体35为外缘带齿的O型支架,该齿与蜗杆22的齿啮合。第二杆体2的中心线垂直于旋转支架体35所在的平面,垂足为旋转支架体35外圆的圆心。支撑装置19为一端和第一杆体14相连,另一端和支撑体36相连的杆。其中第二杆体2上有连续的螺纹,第五杆体15与第一杆体14通过螺纹连接,第一杆体14上有旋入第五杆体15的螺孔,该螺孔为1个或2至24个之间,等距围绕第一杆体14一周,用来在春分日微调节第二杆体2与第一杆体14间的轴向伸缩量,即第五杆体15旋入不同的螺孔,可以微调节法线28与“45°圆锥面”的角度,且所述螺孔中心点均在垂直于第一杆体14中心线的同一平面中,在本文中命名为“螺孔位置平面”。并且为防止第五杆体15受剪力过大,可在第一杆体14与第二杆体2组成的空腔实行气密封,加入一定的气压以利于运行。上位置16、下位置17以及两者的中心位置30分别代表第三个铰链9的轴心在二至时刻位置以及二分时刻位置,第二杆体2上带螺纹部分的杆的位置由以下来确定,即第三个铰链9的轴心在上位置16时,螺纹的下端点位置32(简称下位32)在“螺孔位置平面”中,第三个铰链9轴心在下位置17时,螺纹的上端点位置31(简称上位31)在“螺孔位置平面”中,第三个铰链9轴心在中心位置30时,螺纹的中心位置33(简称中位33)在“螺孔位置平面”中。第三个铰链9轴心从上位置16到下位置17,可伸缩的第三杆体3以第四个铰链38的轴心为轴转过的角度为23.442°,当第三个铰链9轴心在中心位置30处,可伸缩的第三杆体3正好垂直于第二杆体2,第三个铰链9轴心从中心位置30到上位置16、与从中心位置30到下位置17,可伸缩的第三杆体3以第四个铰链38的轴心为轴均转过11.721°。以第四个铰链38轴心为起点至第二杆体2中心线的垂直距离设定为R,则根据三角函数定理可知,以下四段长度:上位置16到中心位置30的距离、中心位置30到下位置17的距离、下位32到中位33的杆长同中位33到上位31的杆长均为R×tg11.21°,以tg代表正切。第二杆体2上的螺纹为连续的单线螺纹,是外螺纹,第二杆体2上螺纹的牙25可以为矩形牙型,其公称直径即大径和第二杆体2的直径相等,小径和中径无特殊要求,第二杆体2为两种形式的杆即其旋向为左旋螺纹型和右旋螺纹型两种杆,从通过螺纹轴线的断面上看,沟槽为矩形,其每个沟槽的形状和尺寸完全一样,每个牙形的高度相等而牙形的宽度不相等,螺距为牙宽加沟槽的宽度即相邻两牙在中径线上对应两点间的轴向距离,该沟槽宽度应小于最小的一圈完整螺距(第二杆体2上螺纹的两端),可为最小的一圈完整螺距的1/5至4/5之间。该设备用于北半球,从冬至到夏至即第三个铰链9的轴心从下位置17到上位置16,对应上位31到下位32上连续的181+3/4圈螺纹,该螺纹为,顺时针驱动旋转支架体35(涉及观察旋转支架体35的旋转方向时,均为从第三个铰链9向第一铰链1方向看),第二杆体2相对于第一杆体14伸出型的螺纹,即左旋螺纹:冬至到春分第三个铰链9轴心从下位置17到中心位置30,对应第二杆体2上的上位31到中位33上连续的89圈螺纹。中位33至上位31之间,中位33开始的第1圈螺纹的螺距为R×tg[-ED(y89)/2]。第2圈螺距为R×tg[-ED(y88)/2]-R×tg[-ED(y89)/2],第3圈螺距为R×tg[-ED(y87)/2]-R×tg[-ED(y88)/2]。设η为大于或等于1的整数,所以第η圈为R×tg{-ED[y(90-η)]/2}-R×tg{-ED[y(90-η+1)]/2},本文将中位33开始的到上位31或下位32,与此数据相同的连续螺纹的螺距命名为“η型螺距”。春分到夏至第三个铰链9轴心从中心位置30到上位置16,对应中位33到下位32上连续的92+3/4圈螺纹。中位33至下位32之间,中位33开始的第1圈螺纹的螺距为R×tg[ED(y91)/2],第2圈螺距为R×tg[ED(y92)/2]-R×tg[ED(y91)/2],
第3圈螺距为R×tg[ED(y93)/2]-R×tg[ED(y92)/2],设μ为大于或等于1的整数,所以第μ圈为R×tg{ED[y(90+μ)]/2}-R×tg{ED[y(90+μ-1)]/2},(3/4圈螺纹不是整数无须制造出,布置在第二杆体2螺纹下位32处即可,对应夏至或冬至当天)本文将中位33开始的到上位31或下位32,与此数据相同的连续螺纹的螺距命名为“μ型螺距”。夏至到冬至第三个铰链9轴心从上位置16到下位置17,对应下位32到上位31上连续的183+1/2圈螺纹,该螺纹为,顺时针驱动旋转支架体35,第二杆体2相对于第一杆体14为缩入型的螺纹,即右旋螺纹。夏至到秋分第三个铰链9中心从上位置16到中心位置30,对应第二杆体2上的下位32到中位33上连续的93+2/3圈螺纹,中位33至下位32之间,中位33开始的第1圈螺纹的螺距为R×tg[ED(B93)/2],第2圈螺距为R×tg[ED(B92)/2]-R×tg[ED(B93)/2],第3圈螺距为R×tg[ED(B91)/2]-R×tg[ED(B92)/2]。设p为大于或等于1的整数,所以第p圈为R×tg{ED[B(94-p)]/2}-R×tg{ED[B(94-p+1)]/2},(2/3圈螺纹无须计算,布置在第二杆体2螺纹下位32处即可,对应夏至或冬至当天)本文将中位33开始的到上位31或下位32,与此数据相同的连续螺纹的螺距命名为“p型螺距”。秋分到冬至第三个铰链9轴心从中心位置30到下位置17,对应第二杆体2上的中位33到上位31上连续的89+5/6圈螺纹,中位33至上位31之间,中位33开始的第1圈螺纹的螺距为R×tg[-ED(B95)/2],第2圈螺距为R×tg[-ED(B96)/2]-R×tg[-ED(B95)/2],第3圈螺距为R×tg[-ED(B97)/2]-R×tg[-ED(B96)/2]。设d为大于或等于1的整数,所以第d圈为R×tg{-ED[B(94+d)]/2}-R×tg{-ED[B(94+d-1)]/2},(5/6圈螺纹不是整数无须计算,布置在上位31处即可,对应夏至或冬至当天)本文将中位33开始的到上位31或下位32,与此数据相同的连续螺纹的螺距命名为“d型螺距”。即第二杆体2螺纹为左旋和右旋两种螺纹,夏至到冬至和冬至到夏至须更换左旋和右旋这两种螺纹的第二杆体2。该设备用于南半球,从南半球夏至到南半球冬至第三个铰链9轴心从上位置16到下位置17,对应下位32到上位31上连续的181+3/4圈螺纹,该螺纹为,逆时针驱动旋转支架体35,第二杆体2相对于第一杆体14缩入型的螺纹,即左旋螺纹:第二杆体2上从下位32到上位31分别为“η型螺距”及“μ型螺距”。南半球冬至到南半球夏至,第三个铰链9轴心从下位置17到上位置16,对应上位31到下位32上连续的183+1/2圈螺纹,该螺纹为,逆时针驱动旋转支架体35,第二杆体2相对于第一杆体14为伸出型的螺纹,即右旋螺纹:第二杆体2上从上位31到下位32分别为“p型螺距”及“d型螺距”。(二)图3的操作方式:1、当在北半球时,使以第一铰链1为轴的第一杆体14与目标点的地轴平行线重合,并且固定第一杆体14。(1)在实施跟踪聚光的前一天,确定“最短时刻立面”,并且使机架21的底座水平,且使定向反光设备中的第一平面镜29的法线28、第一杆体14均在“最短时刻立面”中;同理其他设备的相应各个杆体均在各自“最短时刻立面”中,因为距离近,可以认为各“最短时刻立面”平行:设RD为地球半径则地表同纬度每间隔“距离S”=2πRDsin(90-纬度角)/(24×60×60+ΔS),其“最短时刻立面”之间相差一秒的时间,当各“最短时刻立面”在东西方向上的距离在“距离S”之内,可以认为各“最短时刻立面”平行,例如在赤道“距离S”=463.84米而在南纬或北纬60°“距离S”=231.538米。(2)实施跟踪的当天,在第一铰链1的“正午时刻”之前,将第五杆体15旋入第一杆体14上的任一个螺孔中,驱动聚光设备中的所有旋转支架体35,如是冬至后第n天,则将上位31后,第n圈螺纹与“螺孔位置平面”相交,且使用“η型螺距”和“μ型螺距”的左旋螺纹
的第二杆体。并使第一杆体14中心线与水平面的角度为目标点的纬度值。(3)固定所有的第一杆体14。这时第一杆体14应和南极至北极方向相同。2、当到达第一铰链1的“正午时刻”时,顺时针以“常速”(对于精度要求不很高的情景时,可一周24小时时间)驱动旋转支架体35;反之如是北半球夏至后,顺时针驱动旋转支架体35,使用第二杆体2相对第一杆体14为缩入型的“p型螺距”和“d型螺距”的螺纹即北半球右旋螺纹。旋转支架体35的边缘可以有24×60个齿每个齿对应:360°/(24×60)角度。3、步骤2操作在5秒钟之内完成,可得到反射光线34。调节可连接在框架机构21上的第二平面镜37,使反射光线最终照射到需加热的物体表面。然后始终按“常速”来始终驱动;或在无阳光时,停止驱动旋转支架体35,有阳光时顺时针快速驱动旋转支架体35,1小时对应旋转过15°。当法线28同阳光与地轴平行线相交所确立的平面重合时,即当光斑再次照射到加热物体表面时,再以“常速”顺时针驱动旋转支架体35。4、当到达夏至时刻后,即第三个铰链9轴心到达位置16后,须将第二杆体2更换成北半球即使用“p型螺距”和“d型螺距”的右旋螺纹,如此往复。当地表点101在南半球时同理,只是逆时针驱动旋转支架体35,且第二杆体2须选用南半球左旋螺纹或南半球右旋螺纹。每日校正和春分日校正,到达第一铰链1当天“正午时刻”,调节旋转支架体35使第一平面镜29的法线28在“最短时刻立面”中,旋转支架体35的边缘及支撑体36上均有标记来确定法线28是否在垂直立面中,然后以“常速”驱动旋转支架体35。同理春分日,第五杆体15旋入不同的螺孔,直至使法线28与“45°圆锥面”的角度接近理论值,可更精确地聚光。其中另一种优选的定日镜实施例为图7,定日镜,包括机架21,驱动设备24和传动装置22,以及反射镜37,所述机架21上包括若干套定向反光设备,所述定向反光设备的第一杆体14和所述机架21通过铰链1相连,可观察阳光光线的第四杆体4通过第二个铰链8与所述第一杆体14相连,以及第一平面镜29,活动连接的所述第一杆体14与可转动的第二杆体2;连在一起的所述第一平面镜29和可伸缩的第三杆体3,通过第三个铰链9与所述可转动的第二杆体2相连;所述可伸缩的第三杆体3通过第四个铰链38和可转动的旋转支架体35相连;所述可转动的旋转支架体35在支撑装置19的上,所述支撑装置19与所述第一杆体14相连,所述可转动的旋转支架体35与所述传动装置22相连。改进之处如下,所述第一杆体14上有一个小弧18(以第四杆体4为半径在第一杆体14上的圆弧),小弧18上前位置5和后位置7为二至时分位置,弧中位置6为二分时分位置,并且第四杆体4从前位置5到后位置7转过的角度为46.884°,第四杆体4到弧中位置6时,正好垂直于第一杆体14。所述第一杆体14在第二杆体2中,第五杆体15在所述第二杆体2上,第五杆体15端部与所述第一杆体14上的螺纹25相啮合,所述传动装置22为齿轮,调节机构39在第一杆体14上。支撑装置19上的支撑体为大轮43,可转动的旋转支架体35在大轮43的凹槽中;第一杆体14在半圆键42处分为同轴心的两段,第一杆体14与第二杆体2同轴心。该设备用于北半球,从冬至到夏至第三个铰链9轴心从下位置17到上位置16,对应下位32到上位31上连续的181+3/4圈螺纹,该螺纹为,顺时针驱动旋转支架体35,第一杆体14相对于第二杆体2为伸出型的螺纹,即左旋螺纹:从第一杆体14上的下位32到上位31分别为“η型螺距”及“μ型螺距”。北半球夏至到冬至,第三个铰链9轴心从上位置16到下位置17,对应上位31到下位32上连续的183+1/2圈螺纹,该螺纹为,顺时针旋转第二杆体2,第一杆体14相对于第二杆体2为缩入型的螺纹,即右旋螺纹:从第
一杆体14上的上位31到下位32分别为“p型螺距”及“d型螺距”。该设备用于南半球,从南半球夏至到南半球冬至第三个铰链9轴心从上位置16到下位置17,对应上位31至下位32上连续的181+3/4圈螺纹,该螺纹为,逆时针驱动旋转支架体35,第一杆体14相对于第二杆体2为缩入型的螺纹,即左旋螺纹:从上位31到下位32分别为“η型螺距”及“μ型螺距”。南半球冬至到南半球夏至,第三个铰链9轴心从下位置17到上位置16,对应下位32到上位31上连续的183+1/2圈螺纹,该螺纹为,逆时针旋转第二杆体2,第一杆体14相对于第二杆体2为伸出型的螺纹,即右旋螺纹:从下位32到上位31分别为“p型螺距”及“d型螺距”。图7的操作方式,同具体实施方式中图3的操作步骤不同在于步骤2:第四杆体4用来矫正地球自转的向心力对铅垂线方向的影响,即目标点101的垂线须在“最短时刻立面”中;该垂线如穿过地心则有更高精度。计算当天的赤纬角ED1,使第四杆体4与中间直线(弧中位置6与第二个铰链8轴心的连线)的角度,同赤纬角ED1相同;当到达目标点101“正午时刻”,微调节和第一铰链1相连,定日镜设备中所有的第一杆体14,直至第四杆体4与阳光平行或重合即可。其中另一种优选的定日镜实施例为图8,一种定日镜,包括机架21,驱动设备24和传动装置22,以及反射镜37,所述机架21上包括若干套定向反光设备,每套所述定向反光设备包括至少分成两部分可相对转动的第一杆体14,以及第一平面镜29,可活动连接在所述机架21上的所述第一杆体14;活动连接的所述第一杆体14与可转动的第二杆体2;连在一起的所述第一平面镜29和可伸缩的第三杆体3,与所述第一杆体14铰接;所述可伸缩的第三杆体3与旋转支架体35铰接;所述旋转支架体35与支撑装置19相连,所述支撑装置19与所述可转动的第二杆体2连接。至少分成两部分可相对转动的第一杆体14,指第一杆体14的一部分44可以在第一杆体14的另一部分中自由地转动。该设备用于北半球,从冬至到夏至即旋转支架体35从上位置16到下位置17,对应上位31到下位32上连续的181+3/4圈螺纹,该螺纹为,顺时针驱动旋转支架体35,第二杆体2相对于第一杆体14,从第三个铰链9向第一铰链1方向位移的螺纹,即右旋螺纹:上位31到下位32上连续的螺纹,分别为“η型螺距”及“μ型螺距”的螺纹。夏至到冬至,即旋转支架体35从下位置17到上位置16,对应下位32到上位31上连续的183+1/2圈螺纹,该螺纹为,顺时针驱动旋转支架体35,第二杆体2相对于第一杆体14为从第一个铰链1向第三铰链9方向位移的螺纹,即左旋螺纹:下位32到上位31上连续的螺纹,分别为“p型螺距”及“d型螺距”的螺纹。该设备用于南半球,从南半球冬至到南半球夏至即旋转支架体35从上位置16到下位置17,对应上位31到下位32上连续的183+1/2圈螺纹,该螺纹为,逆时针驱动旋转支架体35,第二杆体2相对于第一杆体14,从第三个铰链9向第一铰链1方向位移的螺纹,即左旋螺纹:上位31到下位32上连续的螺纹,分别为“p型螺距”及“d型螺距”的螺纹。南半球夏至到南半球冬至,即旋转支架体35从下位置17到上位置16,对应下位32到上位31上连续的181+3/4圈螺纹,该螺纹为,逆时针驱动旋转支架体35,第二杆体2相对于第一杆体14为从第一个铰链1向第三铰链9方向位移的螺纹,即右旋螺纹;下位32到上位31上连续的螺纹,分别为“η型螺距”及“μ型螺距”的螺纹。其中一种优选的定向反光设备实施例为图3:定向反光设备,所述定向反光设备包括第一平面镜29,活动连接的第一杆体14与可转动的第二杆体2;连在一起的所述第一
平面镜29和可伸缩的第三杆体3,与所述可转动的第二杆体2铰接;所述可伸缩的第三杆体3与可转动的旋转支架体35铰接;所述可转动的旋转支架体35在支撑装置19上,可连接在所述第一杆体14上的所述支撑装置19。其中另一种优选的定向反光设备实施例为图8:定向反光设备,所述定向反光设备包括至少分成两部分可相对转动的第一杆体14,以及第一平面镜29,活动连接的所述第一杆体14与可转动的第二杆体2;连在一起的所述第一平面镜29和可伸缩的第三杆体3,与所述第一杆体14铰接;所述可伸缩的第三杆体3与旋转支架体35铰接;所述旋转支架体35与支撑装置19相连,所述支撑装置19与所述可转动的第二杆体2连接。作为上述定日镜第一优选实施例的另一种实施方式改进如下:固定连接的所述第一杆体14和所述机架21,所述支撑装置19与所述机架21连接,所述传动装置22为链条,所述传动装置22与所述可转动的旋转支架体35相连;所述支撑装置19上有支撑体36,以及套在一起的所述支撑体36与所述可转动的旋转支架体35。作为上述定日镜第一与二种优选实施例的另一种实施方式改进如下:所述第二杆体2在所述第一杆体14中,第五杆体15在所述第一杆体14上,所述第五杆体15与所述第二杆体2上的螺纹25相啮合;所述第一杆体14和所述机架21通过铰链1相连,所述支撑装置19在所述第一杆体14上;所述支撑装置19上的支撑体为大轮43,所述可转动的旋转支架体35在所述大轮43的凹槽中,所述反射镜37为平面镜,调节机构39在所述第一杆体14上。作为上述定日镜前三种优选实施例改进实施方式如下:螺旋传动的所述第一杆体14与所述可转动的第二杆体2;所述第一杆体14在所述第二杆体2中,第五杆体15在所述第二杆体2上,所述第五杆体15与所述第一杆体14上的螺纹相啮合;所述传动装置22为齿轮,所述传动装置22与所述可转动的旋转支架体35相啮合;调节机构39在机架21上,所述驱动设备24为电机,所述反射镜37为凹面镜;所述支撑装置19的一端是框架式支撑体40,轮41与所述框架式支架体40相连,所述轮41在所述旋转支架体35的凹槽中,所述驱动设备24在所述框架式支撑体40上。作为上述第四种与五种优选实施例改进实施方式如下:所述的定向反光设备,可活动连接在机架上的所述第一杆体14;螺旋传动的所述第一杆体14与所述第二杆体2;所述第二杆体2在所述第一杆体14中,第五杆体15在所述第一杆体14上,所述第五杆体15与所述第二杆体2上的螺纹25相啮合;所述支撑装置19上有支撑体36,以及套在一起的所述支撑体36与所述可转动的旋转支架体35。作为上述第一种优选实施例的另一种实施方式改进如下:所述传动装置22为齿轮,所述传动装置22与所述可转动的第二杆体2啮合;作为上述五种优选实施例的另外八种实施方式改进之处分别是:(一)所述第二平面镜37与其他所述设备均不相连。(二)所述支撑体36在旋转支架体35的凹槽中。(三)第二杆体2的螺纹上每个牙的形状和尺寸完全一样,每个沟槽的高度相等而沟槽的宽度不相等,所述螺杆15端部为凹陷与第二杆体2上螺纹的牙形相啮合。(四)所述可转动的旋转支架体35上有支撑体36,以及套在一起的所述支撑体36与所述支撑装置19。(五)所述旋转支架体35在轮41的凹槽中,传动装置22为平行齿轮。(六)所述支撑装置19的一端是内圈为O型框架式支撑体40,轮41与旋转支架体35相连,轮41在框架式支撑体40
内圈的凹槽中,所述驱动设备24在框架式支撑体40。(七)所述支撑装置19的一端与旋转支架体35组成轴承式连接。(八)所述第一平面镜29和可伸缩的第三杆体3为活动连接。当然,所述跟踪式聚光设备的连接不局限于上述形式,所述各结构特征互换得到的设备,只要其用于跟踪阳光并聚光均属于本发明将要保护的范围之内。

企业营业执照
专利注册证原件
身份证
个体户营业执照
身份证
专利注册证原件
专利代理委托书
转让申请书
转让协议
手续合格通知书
专利证书
专利利登记簿副本




提交

公众号
全国技术转移公共服务平台